 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInexpensive surface electromyography sleeve with consistent electrode placement enables dexterous and stable prosthetic control through deep learning
Feb 28, 2020

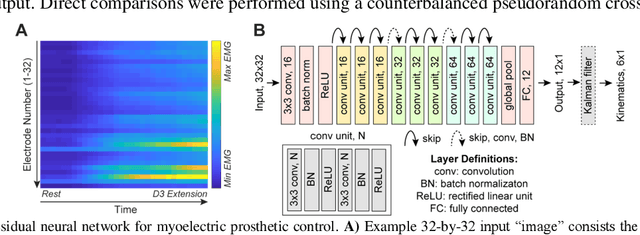

The dexterity of conventional myoelectric prostheses is limited in part by the small datasets used to train the control algorithms. Variations in surface electrode positioning make it difficult to collect consistent data and to estimate motor intent reliably over time. To address these challenges, we developed an inexpensive, easy-to-don sleeve that can record robust and repeatable surface electromyography from 32 embedded monopolar electrodes. Embedded grommets are used to consistently align the sleeve with natural skin markings (e.g., moles, freckles, scars). The sleeve can be manufactured in a few hours for less than $60. Data from seven intact participants show the sleeve provides a signal-to-noise ratio of 14, a don-time under 11 seconds, and sub-centimeter precision for electrode placement. Furthermore, in a case study with one intact participant, we use the sleeve to demonstrate that neural networks can provide simultaneous and proportional control of six degrees of freedom, even 263 days after initial algorithm training. We also highlight that consistent recordings, accumulated over time to establish a large dataset, significantly improve dexterity. These results suggest that deep learning with a 74-layer neural network can substantially improve the dexterity and stability of myoelectric prosthetic control, and that deep-learning techniques can be readily instantiated and further validated through inexpensive sleeves/sockets with consistent recording locations.
A Modular Transradial Bypass Socket for Surface Myoelectric Prosthetic Control in Non-Amputees
Sep 26, 2019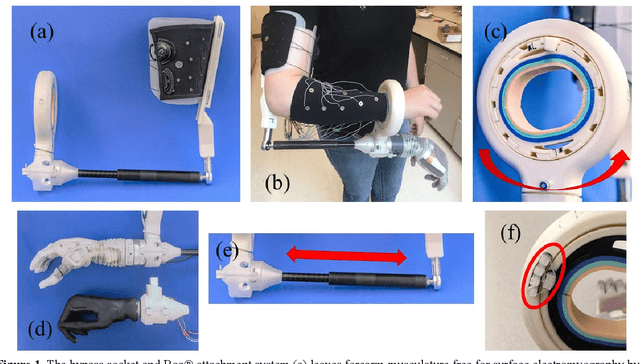
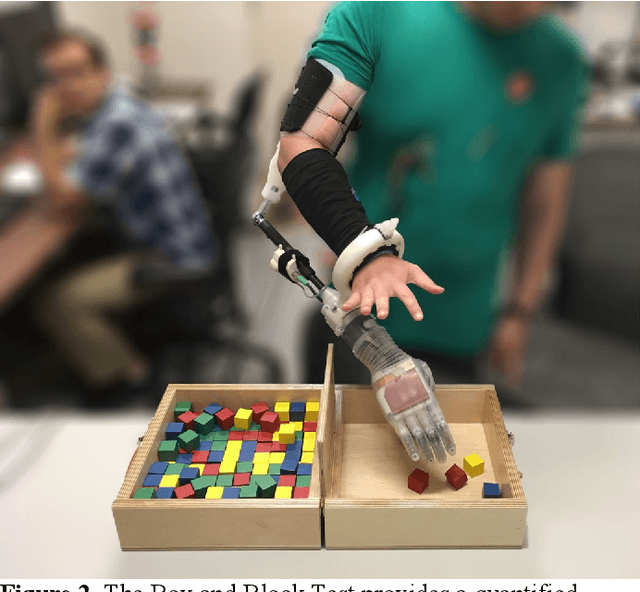
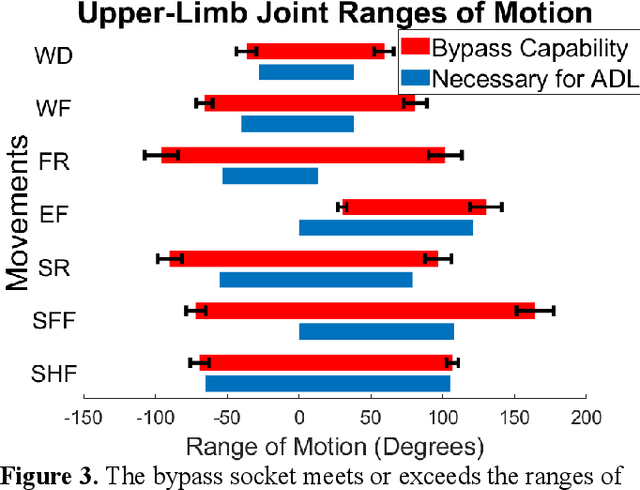
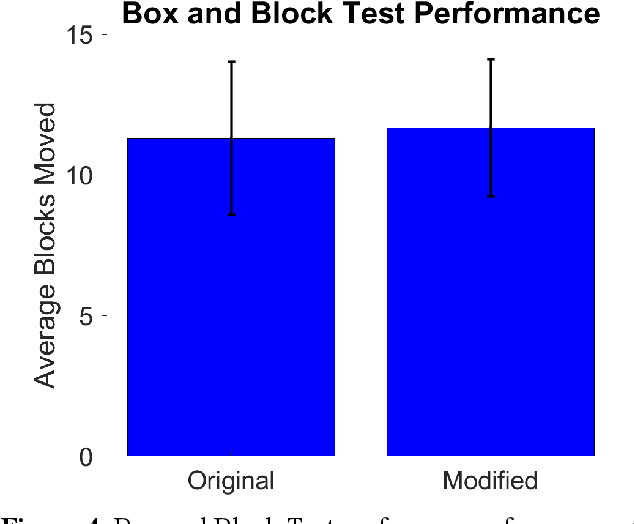
Bypass sockets allow researchers to perform tests of prosthetic systems from the prosthetic user's perspective. We designed a modular upper-limb bypass socket with 3D-printed components that can be easily modified for use with a variety of terminal devices. Our bypass socket preserves access to forearm musculature and the hand, which are necessary for surface electromyography and to provide substituted sensory feedback. Our bypass socket allows a sufficient range of motion to complete tasks in the frontal working area, as measured on non-amputee participants. We examined the performance of non-amputee participants using the bypass socket on the original and modified Box and Block Tests. Participants moved 11.3 +/- 2.7 and 11.7 +/- 2.4 blocks in the original and modified Box and Block Tests (mean +/- SD), respectively, within the range of reported scores using amputee participants. Range-of-motion for users wearing the bypass socket meets or exceeds most reported range-of-motion requirements for activities of daily living. The bypass socket was originally designed with a freely rotating wrist; we found that adding elastic resistance to user wrist rotation while wearing the bypass socket had no significant effect on motor decode performance. We have open-sourced the design files and an assembly manual for the bypass socket. We anticipate that the bypass socket will be a useful tool to evaluate and develop sensorized myoelectric prosthesis technology.
* 8 pages, 5 figures