 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntensity Discriminability of Electrocutaneous and Intraneural Stimulation Pulse Frequency in Intact Individuals and Amputees
Jan 23, 2020



Electrical stimulation of residual nerves can be used to provide amputees with intuitive sensory feedback. An important aspect of this artificial sensory feedback is the ability to convey the magnitude of tactile stimuli. Using classical psychophysical methods, we quantified the just-noticeable differences for electrocutaneous stimulation pulse frequency in both intact participants and one transradial amputee. For the transradial amputee, we also quantified the just-noticeable difference of intraneural microstimulation pulse frequency via chronically implanted Utah Slanted Electrode Arrays. We demonstrate that intensity discrimination is similar across conditions: intraneural microstimulation of the residual nerves, electrocutaneous stimulation of the reinnervated skin on the residual limb, and electrocutaneous stimulation of intact hands. We also show that intensity discrimination performance is significantly better at lower pulse frequencies than at higher ones - a finding that's unique to electrocutaneous and intraneural stimulation and suggests that supplemental sensory cues may be present at lower pulse frequencies. These results can help guide the implementation of artificial sensory feedback for sensorized bionic arms.
Bilaterally Mirrored Movements Improve the Accuracy and Precision of Training Data for Supervised Learning of Neural or Myoelectric Prosthetic Control
Jan 23, 2020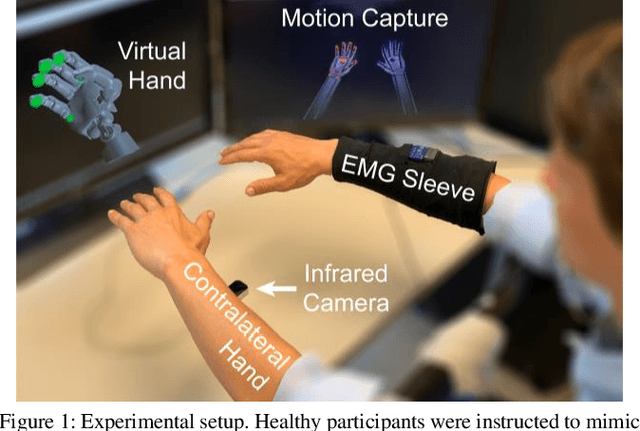
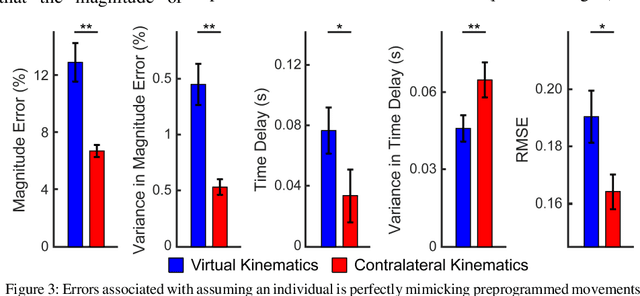
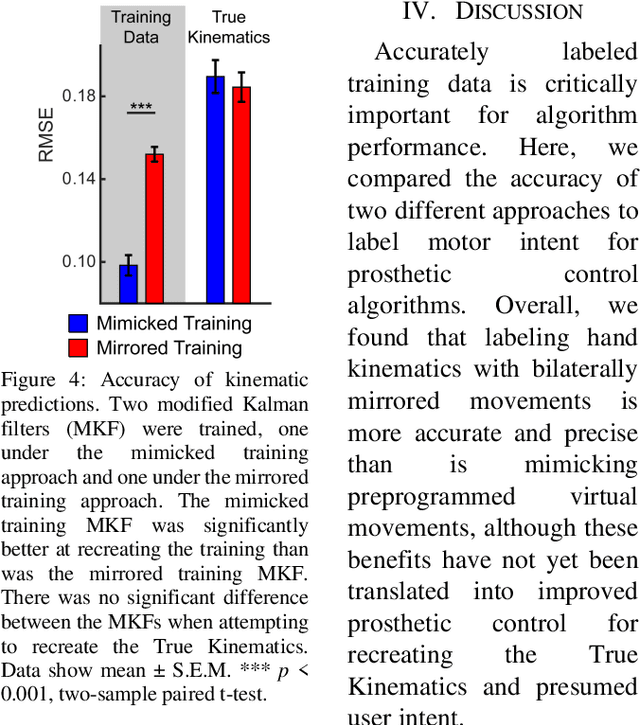
Intuitive control of prostheses relies on training algorithms to correlate biological recordings to motor intent. The quality of the training dataset is critical to run-time performance, but it is difficult to label hand kinematics accurately after the hand has been amputated. We quantified the accuracy and precision of labeling hand kinematics for two different approaches: 1) assuming a participant is perfectly mimicking predetermined motions of a prosthesis (mimicked training), and 2) assuming a participant is perfectly mirroring their contralateral hand during identical bilateral movements (mirrored training). We compared these approaches in non-amputee individuals, using an infrared camera to track eight different joint angles of the hands in real-time. Aggregate data revealed that mimicked training does not account for biomechanical coupling or temporal changes in hand posture. Mirrored training was significantly more accurate and precise at labeling hand kinematics. However, when training a modified Kalman filter to estimate motor intent, the mimicked and mirrored training approaches were not significantly different. The results suggest that the mirrored training approach creates a more faithful but more complex dataset. Advanced algorithms, more capable of learning the complex mirrored training dataset, may yield better run-time prosthetic control.