 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeK-Origins: Better Colour Quantification for Neural Networks
Sep 03, 2024



K-Origins is a neural network layer designed to improve image-based network performances when learning colour, or intensities, is beneficial. Over 250 encoder-decoder convolutional networks are trained and tested on 16-bit synthetic data, demonstrating that K-Origins improves semantic segmentation accuracy in two scenarios: object detection with low signal-to-noise ratios, and segmenting multiple objects that are identical in shape but vary in colour. K-Origins generates output features from the input features, $\textbf{X}$, by the equation $\textbf{Y}_k = \textbf{X}-\textbf{J}\cdot w_k$ for each trainable parameter $w_k$, where $\textbf{J}$ is a matrix of ones. Additionally, networks with varying receptive fields were trained to determine optimal network depths based on the dimensions of target classes, suggesting that receptive field lengths should exceed object sizes. By ensuring a sufficient receptive field length and incorporating K-Origins, we can achieve better semantic network performance.
Beyond Grand Theft Auto V for Training, Testing and Enhancing Deep Learning in Self Driving Cars
Dec 04, 2017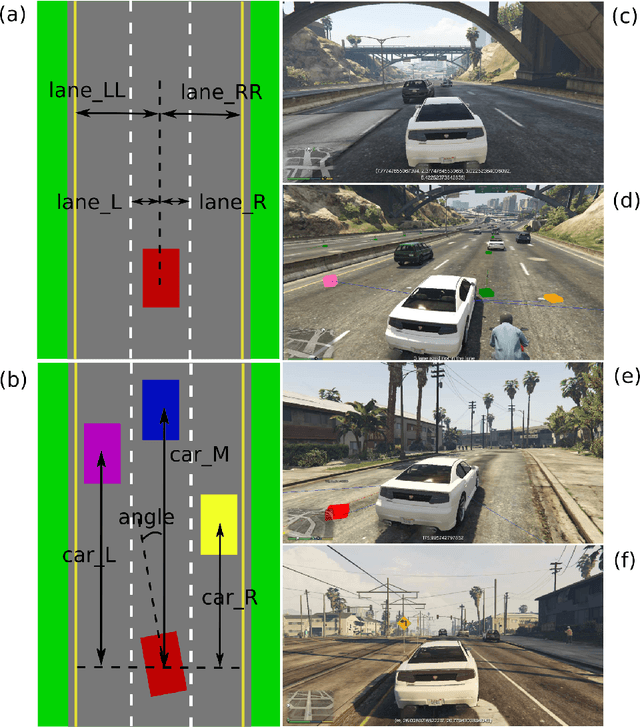

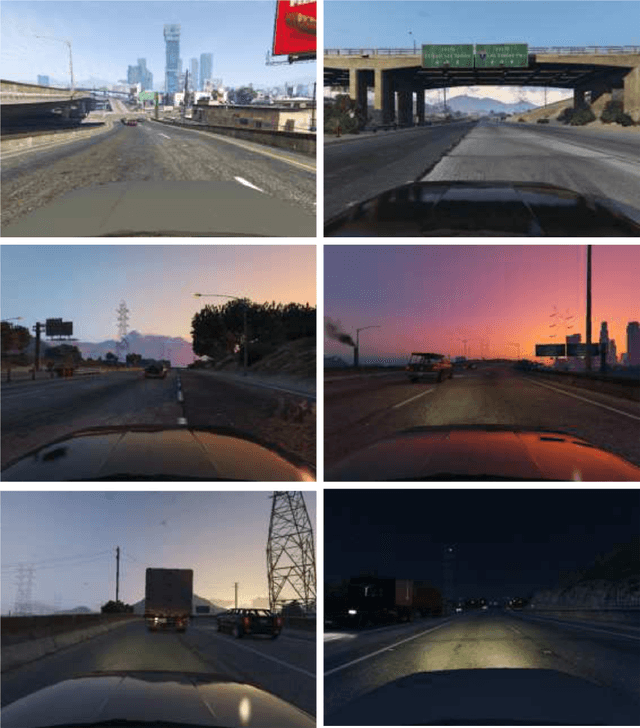
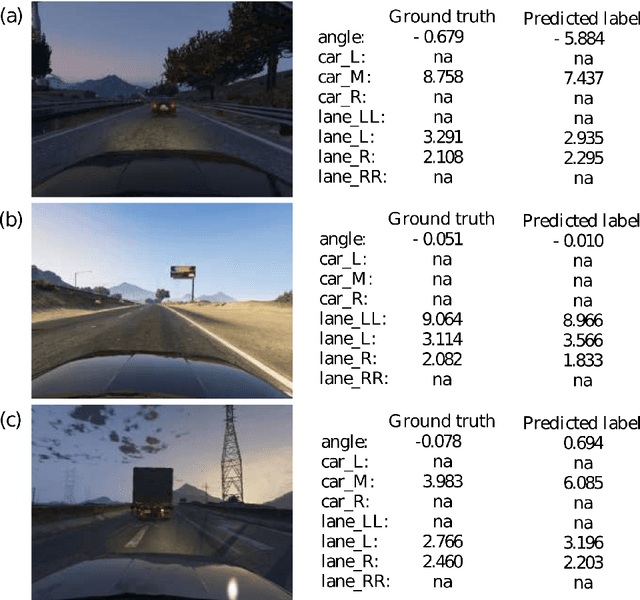
As an initial assessment, over 480,000 labeled virtual images of normal highway driving were readily generated in Grand Theft Auto V's virtual environment. Using these images, a CNN was trained to detect following distance to cars/objects ahead, lane markings, and driving angle (angular heading relative to lane centerline): all variables necessary for basic autonomous driving. Encouraging results were obtained when tested on over 50,000 labeled virtual images from substantially different GTA-V driving environments. This initial assessment begins to define both the range and scope of the labeled images needed for training as well as the range and scope of labeled images needed for testing the definition of boundaries and limitations of trained networks. It is the efficacy and flexibility of a "GTA-V"-like virtual environment that is expected to provide an efficient well-defined foundation for the training and testing of Convolutional Neural Networks for safe driving. Additionally, described is the Princeton Virtual Environment (PVE) for the training, testing and enhancement of safe driving AI, which is being developed using the video-game engine Unity. PVE is being developed to recreate rare but critical corner cases that can be used in re-training and enhancing machine learning models and understanding the limitations of current self driving models. The Florida Tesla crash is being used as an initial reference.