 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTAGE: Scalable and Traversability-Aware Graph based Exploration Planner for Dynamically Varying Environments
Feb 04, 2024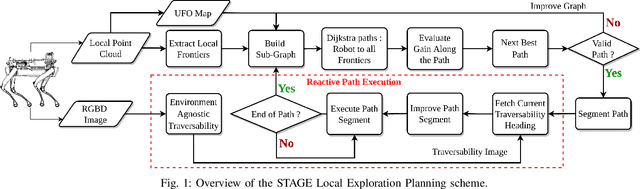
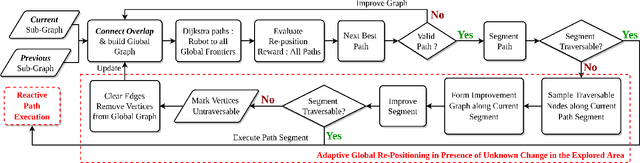
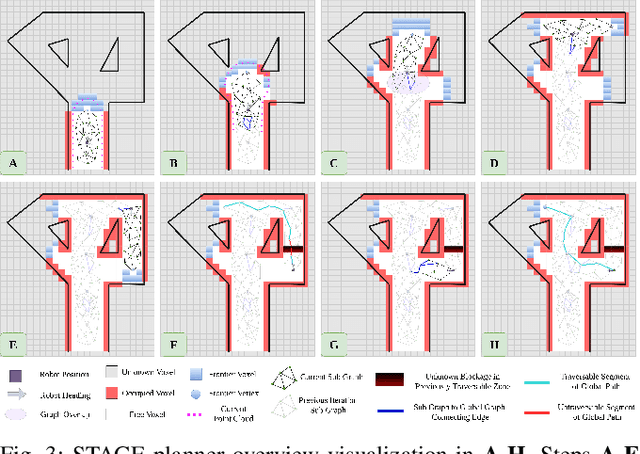
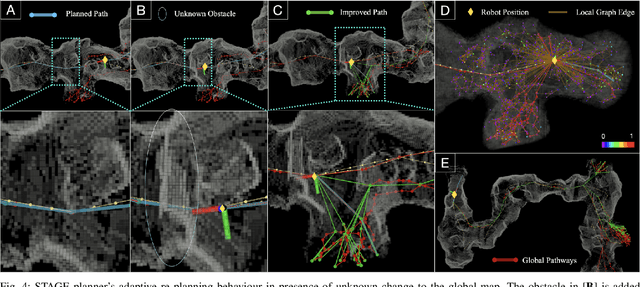
In this article, we propose a novel navigation framework that leverages a two layered graph representation of the environment for efficient large-scale exploration, while it integrates a novel uncertainty awareness scheme to handle dynamic scene changes in previously explored areas. The framework is structured around a novel goal oriented graph representation, that consists of, i) the local sub-graph and ii) the global graph layer respectively. The local sub-graphs encode local volumetric gain locations as frontiers, based on the direct pointcloud visibility, allowing fast graph building and path planning. Additionally, the global graph is build in an efficient way, using node-edge information exchange only on overlapping regions of sequential sub-graphs. Different from the state-of-the-art graph based exploration methods, the proposed approach efficiently re-uses sub-graphs built in previous iterations to construct the global navigation layer. Another merit of the proposed scheme is the ability to handle scene changes (e.g. blocked pathways), adaptively updating the obstructed part of the global graph from traversable to not-traversable. This operation involved oriented sample space of a path segment in the global graph layer, while removing the respective edges from connected nodes of the global graph in cases of obstructions. As such, the exploration behavior is directing the robot to follow another route in the global re-positioning phase through path-way updates in the global graph. Finally, we showcase the performance of the method both in simulation runs as well as deployed in real-world scene involving a legged robot carrying camera and lidar sensor.