 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis
Aug 14, 2025Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. The proposed framework utilizes a Hankel matrix-based representation to model system dynamics, incorporating step-to-step (S2S) transitions to enhance adaptability in dynamic environments. By integrating contact scheduling with trajectory planning, the framework offers an efficient, unified solution for locomotion motion synthesis that enables robust and reactive walking through online replanning. We validate the approach on the Atalante exoskeleton, demonstrating improved robustness and adaptability.
Leg Exoskeleton Odometry using a Limited FOV Depth Sensor
Feb 26, 2025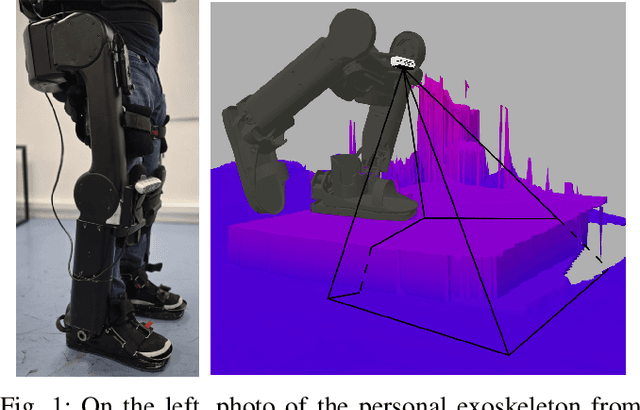
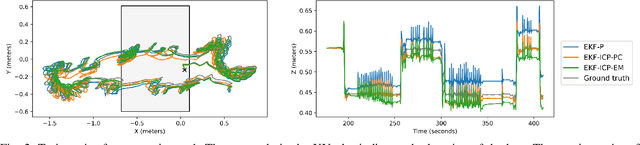
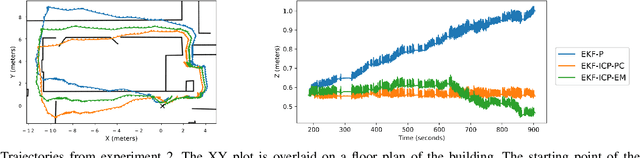
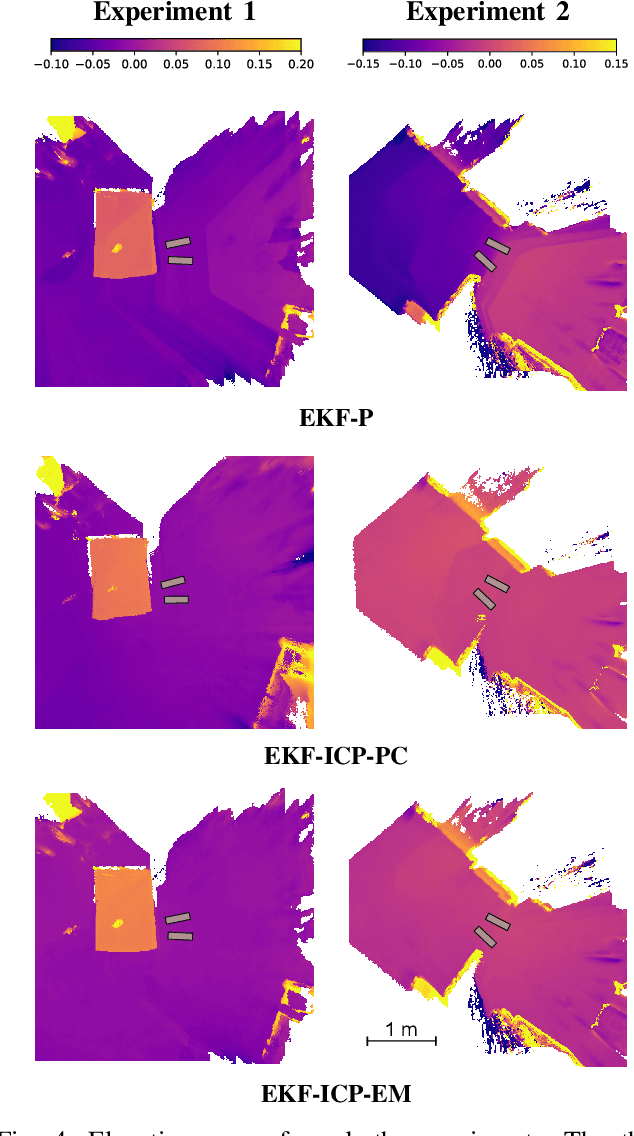
For leg exoskeletons to operate effectively in real-world environments, they must be able to perceive and understand the terrain around them. However, unlike other legged robots, exoskeletons face specific constraints on where depth sensors can be mounted due to the presence of a human user. These constraints lead to a limited Field Of View (FOV) and greater sensor motion, making odometry particularly challenging. To address this, we propose a novel odometry algorithm that integrates proprioceptive data from the exoskeleton with point clouds from a depth camera to produce accurate elevation maps despite these limitations. Our method builds on an extended Kalman filter (EKF) to fuse kinematic and inertial measurements, while incorporating a tailored iterative closest point (ICP) algorithm to register new point clouds with the elevation map. Experimental validation with a leg exoskeleton demonstrates that our approach reduces drift and enhances the quality of elevation maps compared to a purely proprioceptive baseline, while also outperforming a more traditional point cloud map-based variant.
Multi-IMU Proprioceptive State Estimator for Humanoid Robots
Jul 26, 2023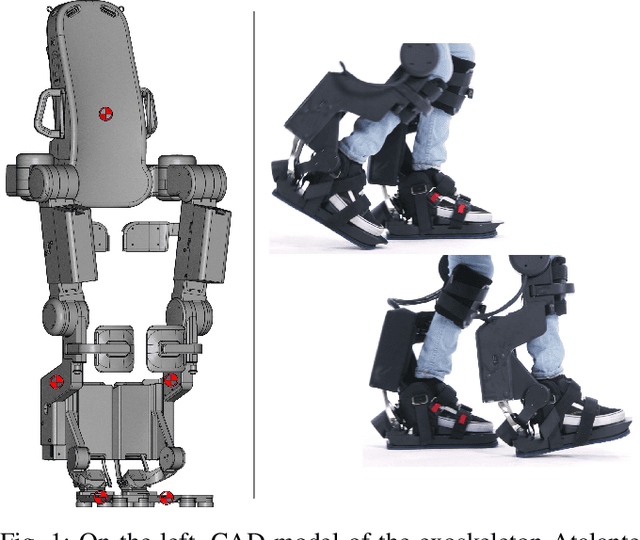
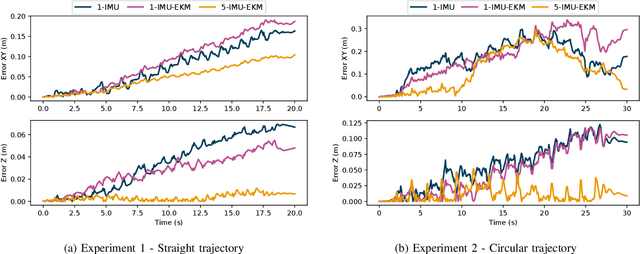
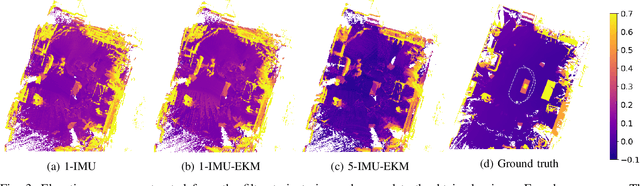

Algorithms for state estimation of humanoid robots usually assume that the feet remain flat and in a constant position while in contact with the ground. However, this hypothesis is easily violated while walking, especially for human-like gaits with heel-toe motion. This reduces the time during which the contact assumption can be used, or requires higher variances to account for errors. In this paper, we present a novel state estimator based on the extended Kalman filter that can properly handle any contact configuration. We consider multiple inertial measurement units (IMUs) distributed throughout the robot's structure, including on both feet, which are used to track multiple bodies of the robot. This multi-IMU instrumentation setup also has the advantage of allowing the deformations in the robot's structure to be estimated, improving the kinematic model used in the filter. The proposed approach is validated experimentally on the exoskeleton Atalante and is shown to present low drift, performing better than similar single-IMU filters. The obtained trajectory estimates are accurate enough to construct elevation maps that have little distortion with respect to the ground truth.
Enabling safe walking rehabilitation on the exoskeleton Atalante: experimental results
Apr 17, 2023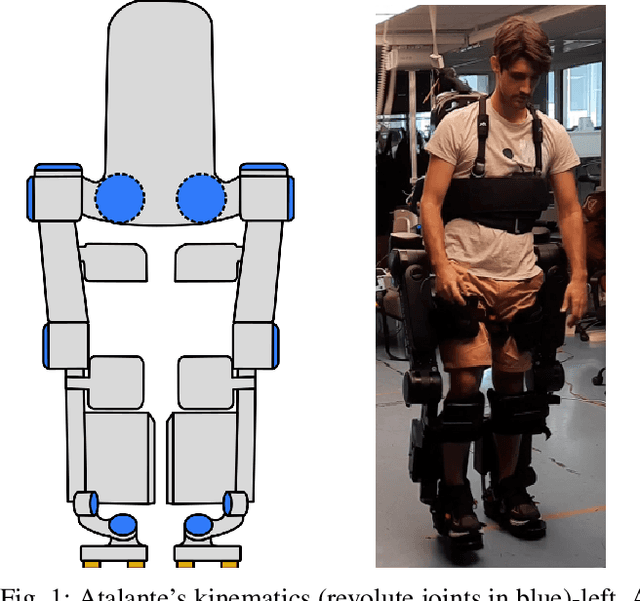
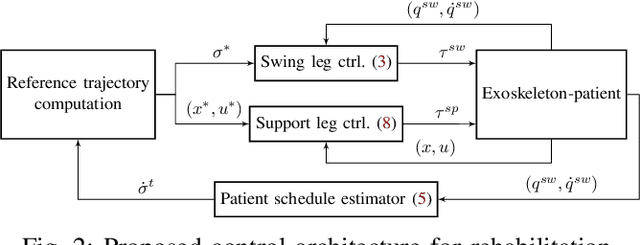
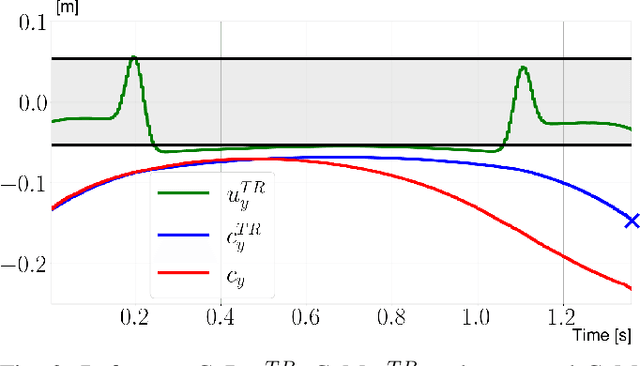

This paper exposes a control architecture enabling rehabilitation of walking impaired patients with the lower-limb exoskeleton Atalante. Atalante's control system is modified to allow the patient to contribute to the walking motion through their efforts. Only the swing leg degree of freedom along the nominal path is relaxed. An online trajectory optimization checks that the muscle forces do not jeopardize stability. The optimization generates reference trajectories that satisfy several key constraints from the current point to the end of the step. One of the constraints requires that the center or pressure remains inside the support polygon, which ensures that the support leg subsystem successfully tracks the reference trajectory. As a result of the presented works, the robot provides a non-zero force in the direction of motion only when required, helping the patient go fast enough to maintain balance (or preventing him from going too fast). Experimental results are reported. They illustrate that variations of $\pm$50% of the duration of the step can be achieved in response to the patient's efforts and that many steps are achieved without falling. A video of the experiments can be viewed at https://youtu.be/_1A-2nLy5ZE