 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeg Exoskeleton Odometry using a Limited FOV Depth Sensor
Feb 26, 2025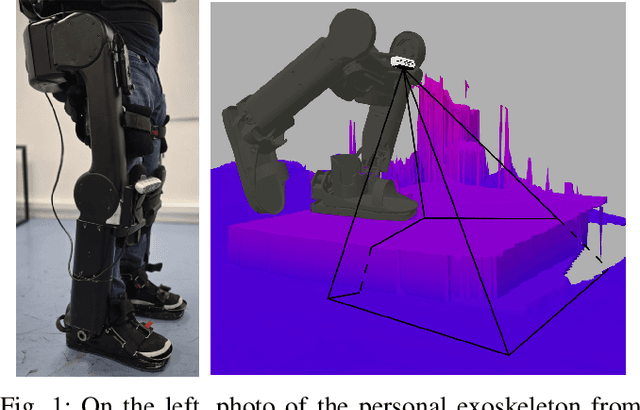
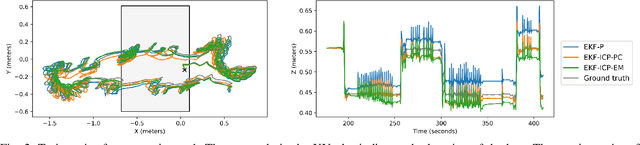
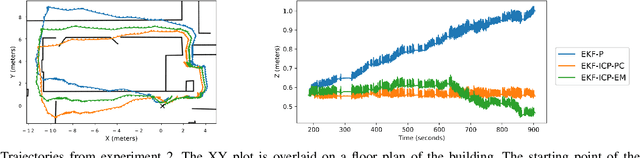
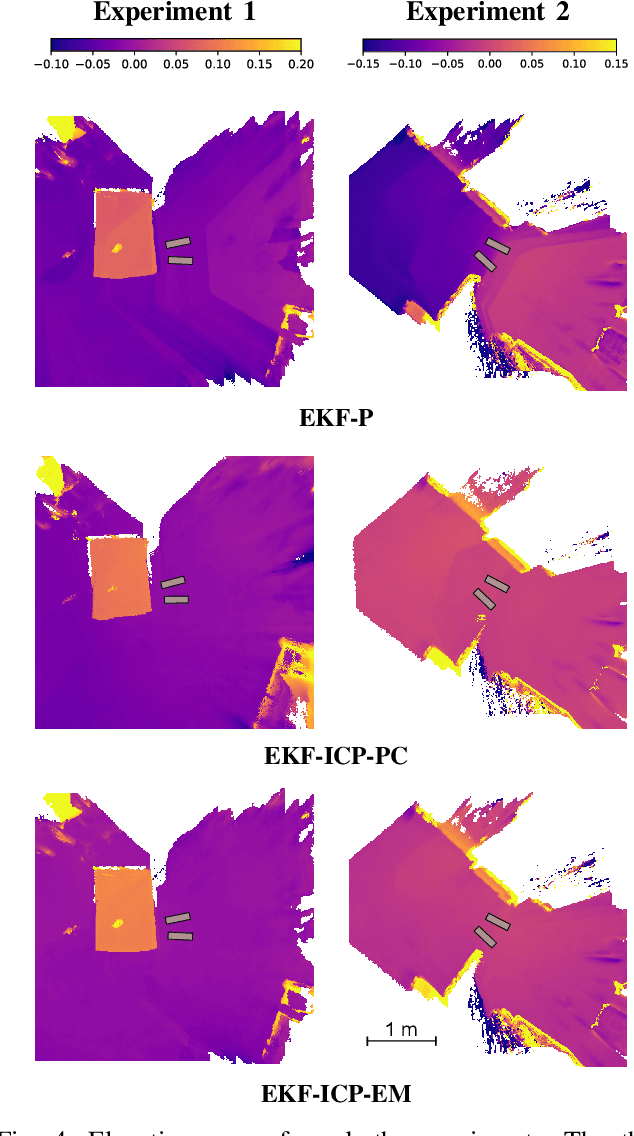
For leg exoskeletons to operate effectively in real-world environments, they must be able to perceive and understand the terrain around them. However, unlike other legged robots, exoskeletons face specific constraints on where depth sensors can be mounted due to the presence of a human user. These constraints lead to a limited Field Of View (FOV) and greater sensor motion, making odometry particularly challenging. To address this, we propose a novel odometry algorithm that integrates proprioceptive data from the exoskeleton with point clouds from a depth camera to produce accurate elevation maps despite these limitations. Our method builds on an extended Kalman filter (EKF) to fuse kinematic and inertial measurements, while incorporating a tailored iterative closest point (ICP) algorithm to register new point clouds with the elevation map. Experimental validation with a leg exoskeleton demonstrates that our approach reduces drift and enhances the quality of elevation maps compared to a purely proprioceptive baseline, while also outperforming a more traditional point cloud map-based variant.
Multi-IMU Proprioceptive State Estimator for Humanoid Robots
Jul 26, 2023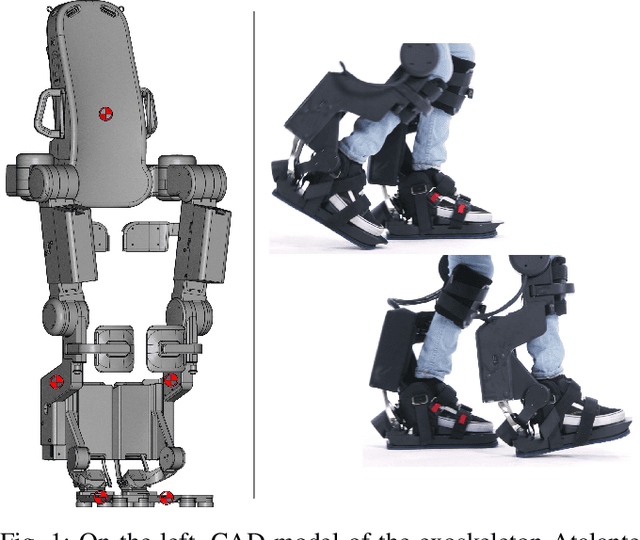
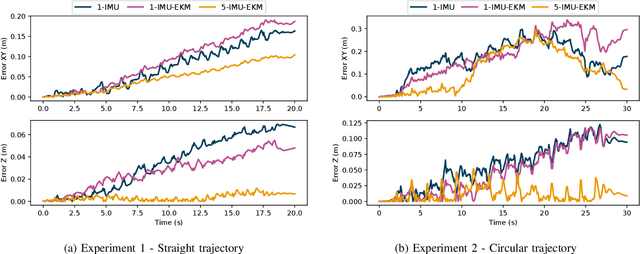
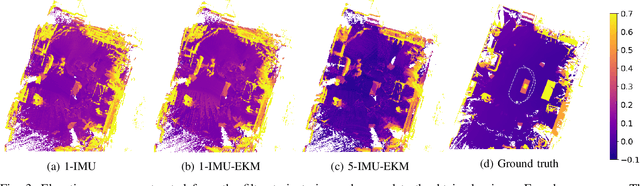

Algorithms for state estimation of humanoid robots usually assume that the feet remain flat and in a constant position while in contact with the ground. However, this hypothesis is easily violated while walking, especially for human-like gaits with heel-toe motion. This reduces the time during which the contact assumption can be used, or requires higher variances to account for errors. In this paper, we present a novel state estimator based on the extended Kalman filter that can properly handle any contact configuration. We consider multiple inertial measurement units (IMUs) distributed throughout the robot's structure, including on both feet, which are used to track multiple bodies of the robot. This multi-IMU instrumentation setup also has the advantage of allowing the deformations in the robot's structure to be estimated, improving the kinematic model used in the filter. The proposed approach is validated experimentally on the exoskeleton Atalante and is shown to present low drift, performing better than similar single-IMU filters. The obtained trajectory estimates are accurate enough to construct elevation maps that have little distortion with respect to the ground truth.