 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar Spectra-Language Model for Automotive Scene Parsing
Jun 04, 2024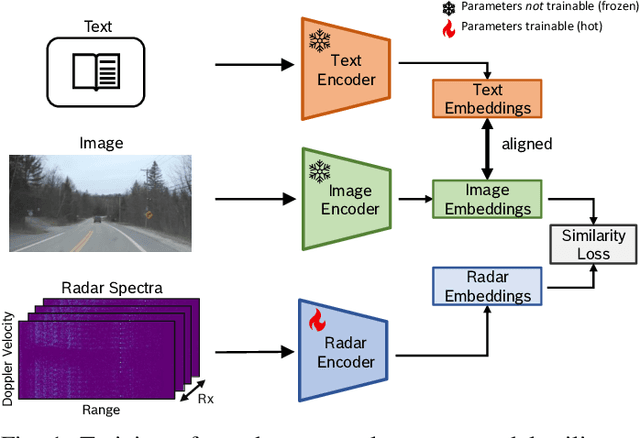



Radar sensors are low cost, long-range, and weather-resilient. Therefore, they are widely used for driver assistance functions, and are expected to be crucial for the success of autonomous driving in the future. In many perception tasks only pre-processed radar point clouds are considered. In contrast, radar spectra are a raw form of radar measurements and contain more information than radar point clouds. However, radar spectra are rather difficult to interpret. In this work, we aim to explore the semantic information contained in spectra in the context of automated driving, thereby moving towards better interpretability of radar spectra. To this end, we create a radar spectra-language model, allowing us to query radar spectra measurements for the presence of scene elements using free text. We overcome the scarcity of radar spectra data by matching the embedding space of an existing vision-language model (VLM). Finally, we explore the benefit of the learned representation for scene parsing, and obtain improvements in free space segmentation and object detection merely by injecting the spectra embedding into a baseline model.