 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Analysing Invoices and Receipts with Amazon Textract
Dec 23, 2025This paper presents an evaluation of the AWS Textract in the context of extracting data from receipts. We analyse Textract functionalities using a dataset that includes receipts of varied formats and conditions. Our analysis provided a qualitative view of Textract strengths and limitations. While the receipts totals were consistently detected, we also observed typical issues and irregularities that were often influenced by image quality and layout. Based on the analysis of the observations, we propose mitigation strategies.
Agile Retrospectives: What went well? What didn't go well? What should we do?
Apr 16, 2025In Agile/Scrum software development, the idea of retrospective meetings (retros) is one of the core elements of the project process. In this paper, we present our work in progress focusing on two aspects: analysis of potential usage of generative AI for information interaction within retrospective meetings, and visualisation of retros' information to software development teams. We also present our prototype tool RetroAI++, focusing on retros-related functionalities.
Towards computer vision technologies: Semi-automated reading of automated utility meters
Nov 24, 2022



In this report we analysed a possibility of using computer vision techniques for automated reading of utility meters. In our study, we focused on two computer vision techniques: an open-source solution Tensorflow Object Detection (Tensorflow) and a commercial solution Anyline. This report extends our previous publication: We start with presentation of a structured analysis of related approaches. After that we provide a detailed comparison of two computer vision technologies, Tensorflow Object Detection (Tensorflow) and Anyline, applied to semi-automated reading of utility meters. In this paper, we discuss limitations and benefits of each solution applied to utility meters reading, especially focusing on aspects such as accuracy and inference time. Our goal was to determine the solution that is the most suitable for this particular application area, where there are several specific challenges.
Towards Software Development For Social Robotics Systems
Dec 22, 2017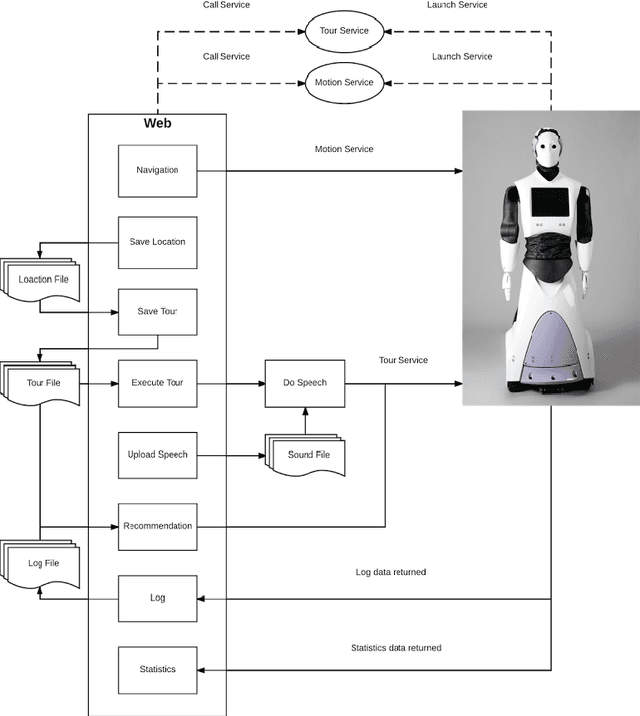
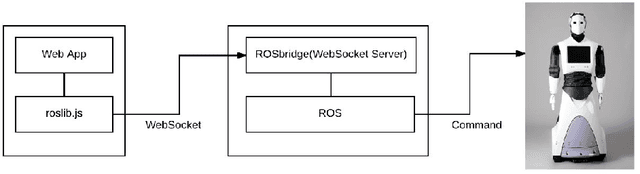
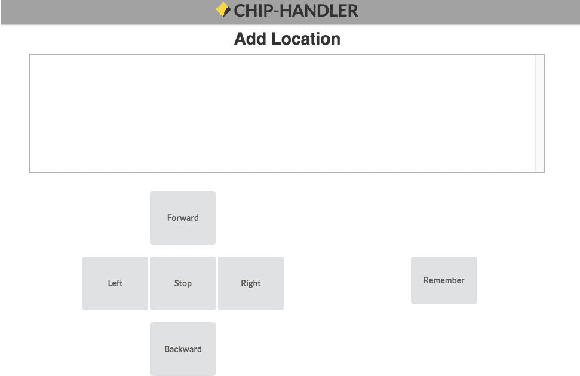

In this paper we introduce the core results of the project on software development for social robotics systems. The usability of maintenance and control features is crucial for many kinds of systems, but in the case of social robotics we also have to take into account that (1) the humanoid robot physically interacts with humans, (2) the conversation with children might have different requirements in comparison to the conversation with adults. The results of our work were implement for the humanoid PAL REEM robot, but their core ideas can be applied for other types of humanoid robots. We developed a web-based solution that supports the management of robot-guided tours, provides recommendations for the users as well as allows for a visual analysis of the data on previous tours.