 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFish2Mesh Transformer: 3D Human Mesh Recovery from Egocentric Vision
Mar 08, 2025Egocentric human body estimation allows for the inference of user body pose and shape from a wearable camera's first-person perspective. Although research has used pose estimation techniques to overcome self-occlusions and image distortions caused by head-mounted fisheye images, similar advances in 3D human mesh recovery (HMR) techniques have been limited. We introduce Fish2Mesh, a fisheye-aware transformer-based model designed for 3D egocentric human mesh recovery. We propose an egocentric position embedding block to generate an ego-specific position table for the Swin Transformer to reduce fisheye image distortion. Our model utilizes multi-task heads for SMPL parametric regression and camera translations, estimating 3D and 2D joints as auxiliary loss to support model training. To address the scarcity of egocentric camera data, we create a training dataset by employing the pre-trained 4D-Human model and third-person cameras for weak supervision. Our experiments demonstrate that Fish2Mesh outperforms previous state-of-the-art 3D HMR models.
Towards a Multi-purpose Robotic Nursing Assistant
Jun 07, 2021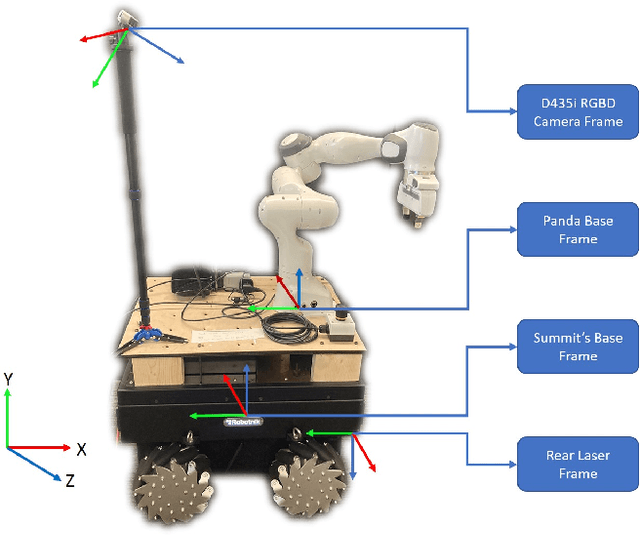
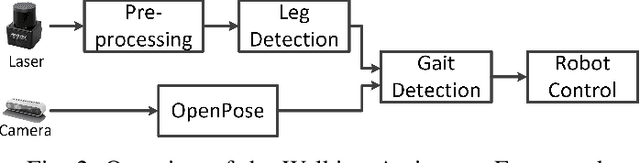
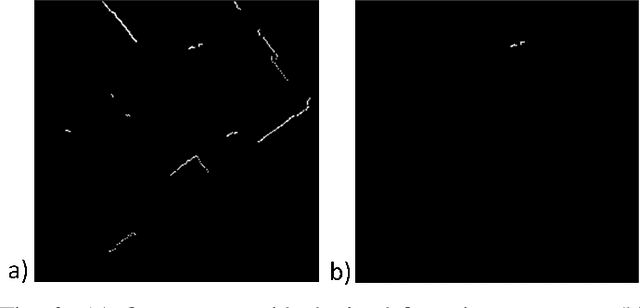
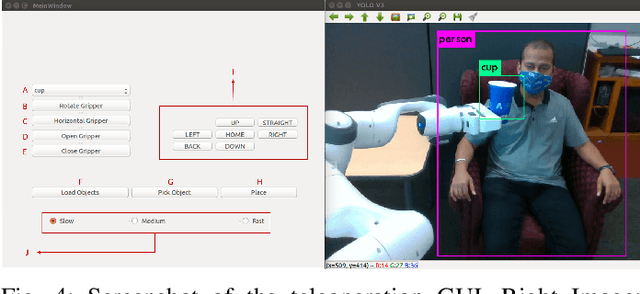
Robotic nursing aid is one of the heavily researched areas in robotics nowadays. Several robotic assistants exist that only focus on a specific function related to nurses assistance or functions related to patient aid. There is a need for a unified system that not only performs tasks that would assist nurses and reduce their burden but also perform tasks that help a patient. In recent times, due to the COVID-19 pandemic, there is also an increase in the need for robotic assistants that have teleoperation capabilities to provide better protection against the virus spread. To address these requirements, we propose a novel Multi-purpose Intelligent Nurse Aid (MINA) robotic system that is capable of providing walking assistance to the patients and perform teleoperation tasks with an easy-to-use and intuitive Graphical User Interface (GUI). This paper also presents preliminary results from the walking assistant task that improves upon the current state-of-the-art methods and shows the developed GUI for teleoperation.
Automated system to measure Tandem Gait to assess executive functions in children
Dec 28, 2020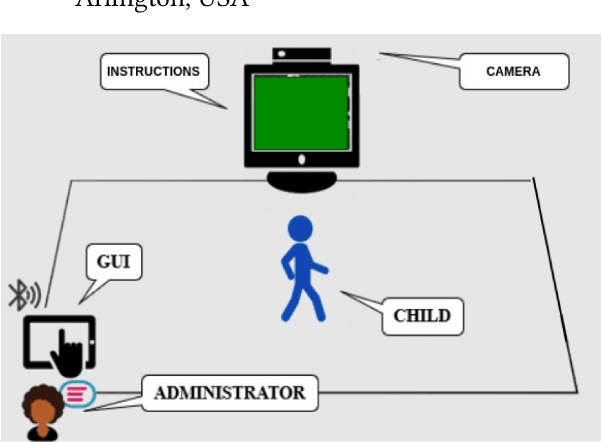
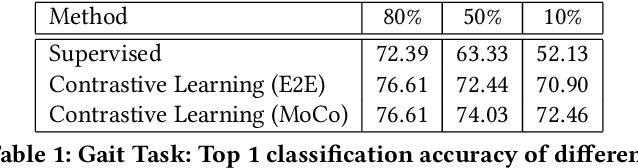
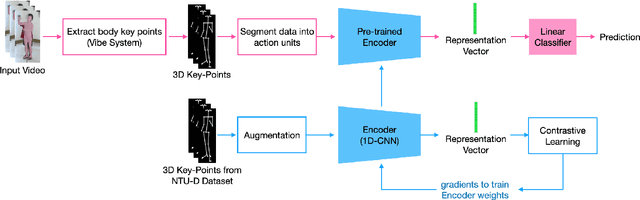
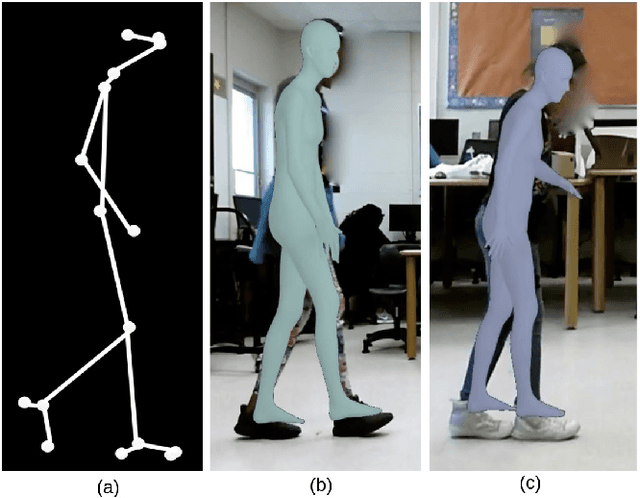
As mobile technologies have become ubiquitous in recent years, computer-based cognitive tests have become more popular and efficient. In this work, we focus on assessing motor function in children by analyzing their gait movements. Although there has been a lot of research on designing automated assessment systems for gait analysis, most of these efforts use obtrusive wearable sensors for measuring body movements. We have devised a computer vision-based assessment system that only requires a camera which makes it easier to employ in school or home environments. A dataset has been created with 27 children performing the test. Furthermore in order to improve the accuracy of the system, a deep learning based model was pre-trained on NTU-RGB+D 120 dataset and then it was fine-tuned on our gait dataset. The results highlight the efficacy of proposed work for automating the assessment of children's performances by achieving 76.61% classification accuracy.