 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Multi-purpose Robotic Nursing Assistant
Jun 07, 2021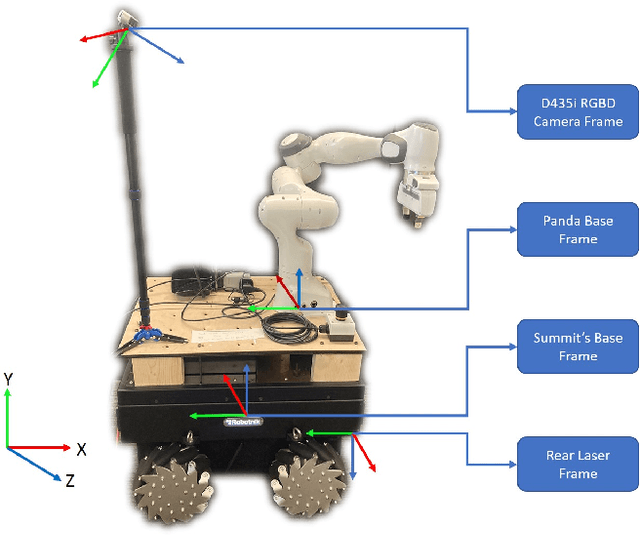
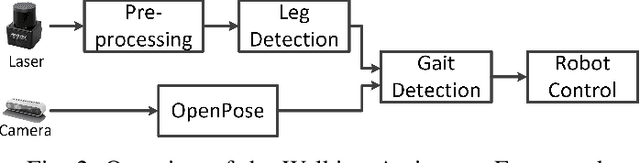
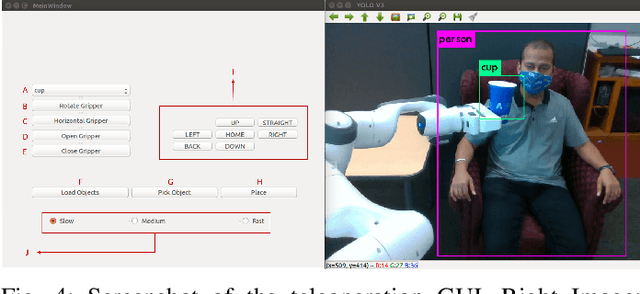
Robotic nursing aid is one of the heavily researched areas in robotics nowadays. Several robotic assistants exist that only focus on a specific function related to nurses assistance or functions related to patient aid. There is a need for a unified system that not only performs tasks that would assist nurses and reduce their burden but also perform tasks that help a patient. In recent times, due to the COVID-19 pandemic, there is also an increase in the need for robotic assistants that have teleoperation capabilities to provide better protection against the virus spread. To address these requirements, we propose a novel Multi-purpose Intelligent Nurse Aid (MINA) robotic system that is capable of providing walking assistance to the patients and perform teleoperation tasks with an easy-to-use and intuitive Graphical User Interface (GUI). This paper also presents preliminary results from the walking assistant task that improves upon the current state-of-the-art methods and shows the developed GUI for teleoperation.