 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFault-Tolerant Control of Degrading Systems with On-Policy Reinforcement Learning
Aug 10, 2020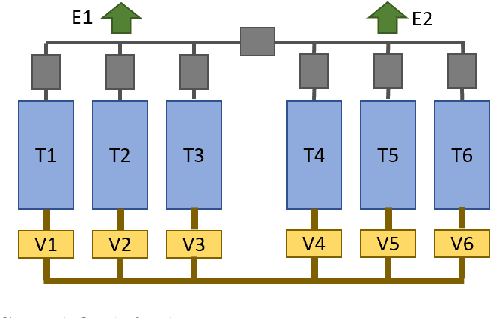
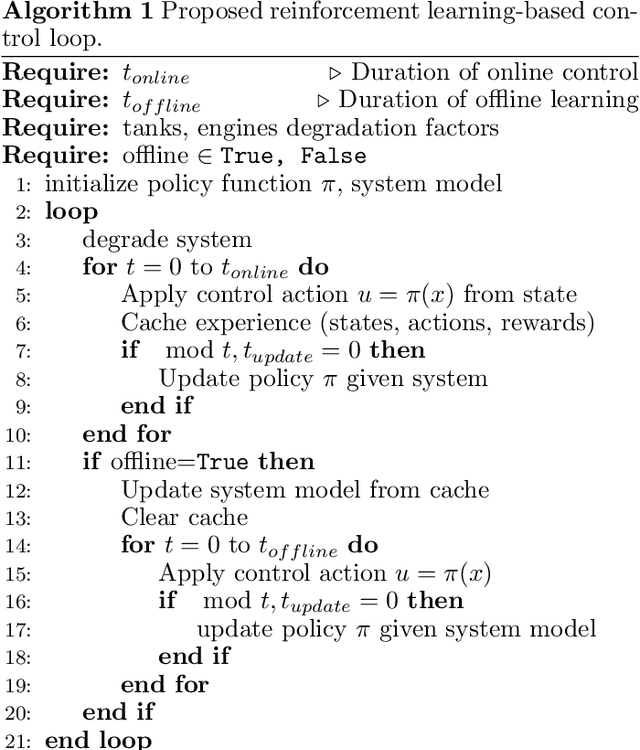
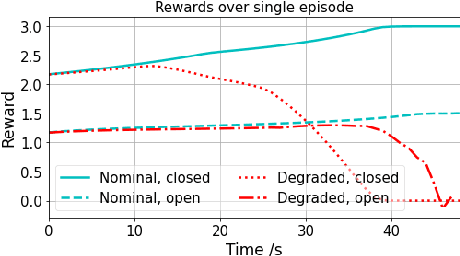
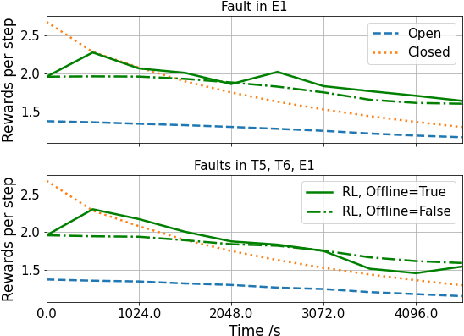
We propose a novel adaptive reinforcement learning control approach for fault tolerant control of degrading systems that is not preceded by a fault detection and diagnosis step. Therefore, \textit{a priori} knowledge of faults that may occur in the system is not required. The adaptive scheme combines online and offline learning of the on-policy control method to improve exploration and sample efficiency, while guaranteeing stable learning. The offline learning phase is performed using a data-driven model of the system, which is frequently updated to track the system's operating conditions. We conduct experiments on an aircraft fuel transfer system to demonstrate the effectiveness of our approach.
A Relearning Approach to Reinforcement Learning for Control of Smart Buildings
Aug 04, 2020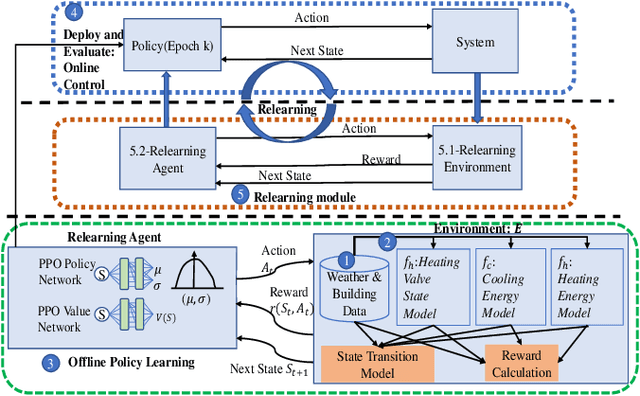
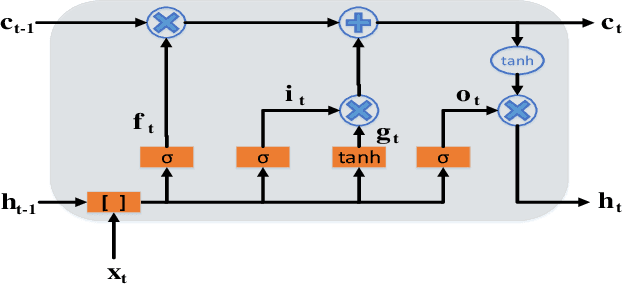
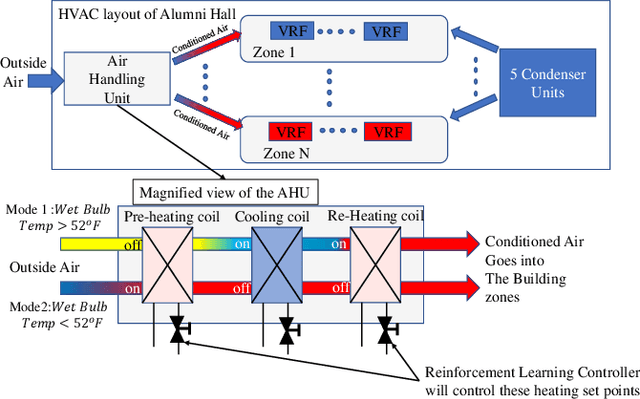
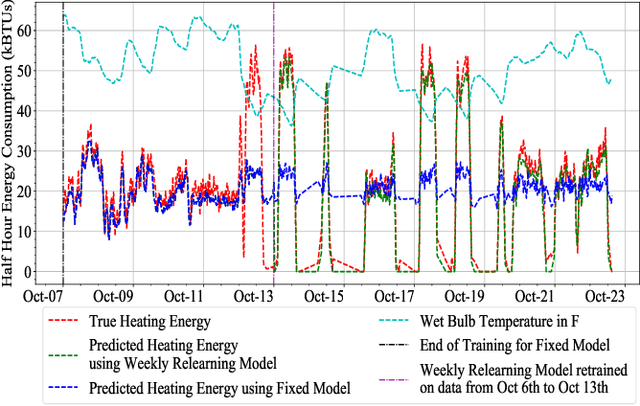
This paper demonstrates that continual relearning of control policies using incremental deep reinforcement learning (RL) can improve policy learning for non-stationary processes. We demonstrate this approach for a data-driven 'smart building environment' that we use as a test-bed for developing HVAC controllers for reducing energy consumption of large buildings on our university campus. The non-stationarity in building operations and weather patterns makes it imperative to develop control strategies that are adaptive to changing conditions. On-policy RL algorithms, such as Proximal Policy Optimization (PPO) represent an approach for addressing this non-stationarity, but exploration on the actual system is not an option for safety-critical systems. As an alternative, we develop an incremental RL technique that simultaneously reduces building energy consumption without sacrificing overall comfort. We compare the performance of our incremental RL controller to that of a static RL controller that does not implement the relearning function. The performance of the static controller diminishes significantly over time, but the relearning controller adjusts to changing conditions while ensuring comfort and optimal energy performance.