Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFault-Tolerant Control of Degrading Systems with On-Policy Reinforcement Learning
Paper and Code
Aug 10, 2020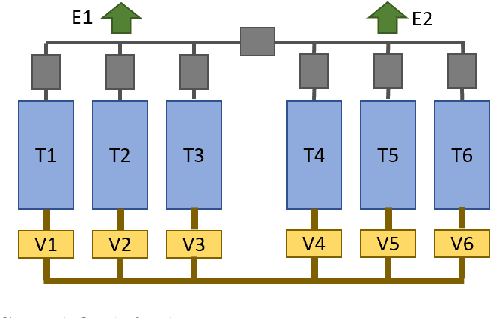
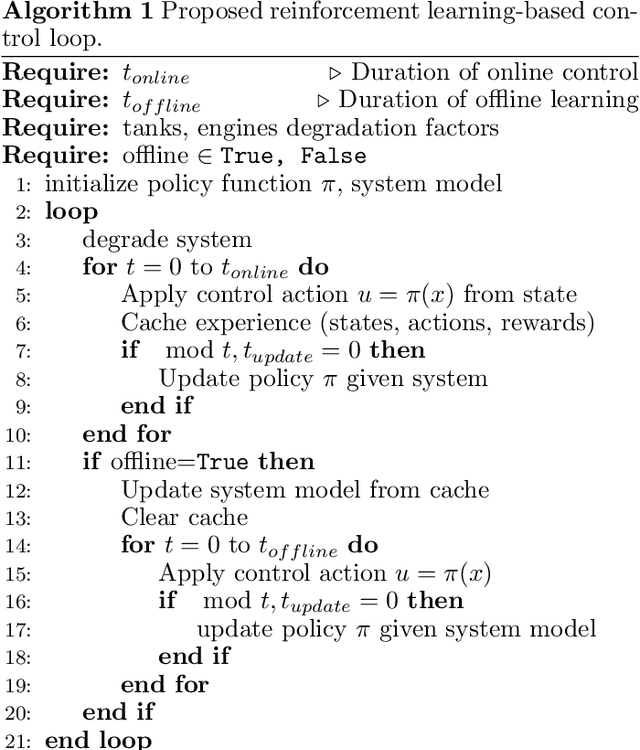
We propose a novel adaptive reinforcement learning control approach for fault tolerant control of degrading systems that is not preceded by a fault detection and diagnosis step. Therefore, \textit{a priori} knowledge of faults that may occur in the system is not required. The adaptive scheme combines online and offline learning of the on-policy control method to improve exploration and sample efficiency, while guaranteeing stable learning. The offline learning phase is performed using a data-driven model of the system, which is frequently updated to track the system's operating conditions. We conduct experiments on an aircraft fuel transfer system to demonstrate the effectiveness of our approach.
* Published in IFAC World Congress 2020
View paper on