 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Pose Refinement in 3D Gaussian Splatting under Pose Prior and Geometric Uncertainty
Mar 17, 20263D Gaussian Splatting (3DGS) has recently emerged as a powerful scene representation and is increasingly used for visual localization and pose refinement. However, despite its high-quality differentiable rendering, the robustness of 3DGS-based pose refinement remains highly sensitive to both the initial camera pose and the reconstructed geometry. In this work, we take a closer look at these limitations and identify two major sources of uncertainty: (i) pose prior uncertainty, which often arises from regression or retrieval models that output a single deterministic estimate, and (ii) geometric uncertainty, caused by imperfections in the 3DGS reconstruction that propagate errors into PnP solvers. Such uncertainties can distort reprojection geometry and destabilize optimization, even when the rendered appearance still looks plausible. To address these uncertainties, we introduce a relocalization framework that combines Monte Carlo pose sampling with Fisher Information-based PnP optimization. Our method explicitly accounts for both pose and geometric uncertainty and requires no retraining or additional supervision. Across diverse indoor and outdoor benchmarks, our approach consistently improves localization accuracy and significantly increases stability under pose and depth noise.
DGS-SLAM: Gaussian Splatting SLAM in Dynamic Environment
Nov 16, 2024
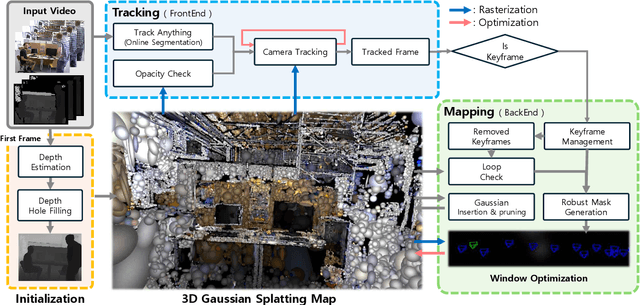
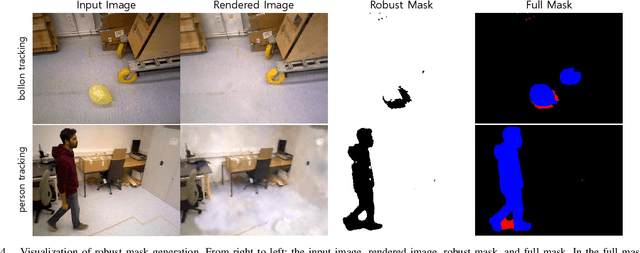

We introduce Dynamic Gaussian Splatting SLAM (DGS-SLAM), the first dynamic SLAM framework built on the foundation of Gaussian Splatting. While recent advancements in dense SLAM have leveraged Gaussian Splatting to enhance scene representation, most approaches assume a static environment, making them vulnerable to photometric and geometric inconsistencies caused by dynamic objects. To address these challenges, we integrate Gaussian Splatting SLAM with a robust filtering process to handle dynamic objects throughout the entire pipeline, including Gaussian insertion and keyframe selection. Within this framework, to further improve the accuracy of dynamic object removal, we introduce a robust mask generation method that enforces photometric consistency across keyframes, reducing noise from inaccurate segmentation and artifacts such as shadows. Additionally, we propose the loop-aware window selection mechanism, which utilizes unique keyframe IDs of 3D Gaussians to detect loops between the current and past frames, facilitating joint optimization of the current camera poses and the Gaussian map. DGS-SLAM achieves state-of-the-art performance in both camera tracking and novel view synthesis on various dynamic SLAM benchmarks, proving its effectiveness in handling real-world dynamic scenes.
Fast Global Localization on Neural Radiance Field
Jun 18, 2024



Neural Radiance Fields (NeRF) presented a novel way to represent scenes, allowing for high-quality 3D reconstruction from 2D images. Following its remarkable achievements, global localization within NeRF maps is an essential task for enabling a wide range of applications. Recently, Loc-NeRF demonstrated a localization approach that combines traditional Monte Carlo Localization with NeRF, showing promising results for using NeRF as an environment map. However, despite its advancements, Loc-NeRF encounters the challenge of a time-intensive ray rendering process, which can be a significant limitation in practical applications. To address this issue, we introduce Fast Loc-NeRF, which leverages a coarse-to-fine approach to enable more efficient and accurate NeRF map-based global localization. Specifically, Fast Loc-NeRF matches rendered pixels and observed images on a multi-resolution from low to high resolution. As a result, it speeds up the costly particle update process while maintaining precise localization results. Additionally, to reject the abnormal particles, we propose particle rejection weighting, which estimates the uncertainty of particles by exploiting NeRF's characteristics and considers them in the particle weighting process. Our Fast Loc-NeRF sets new state-of-the-art localization performances on several benchmarks, convincing its accuracy and efficiency.