 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReview on 3D Lidar Localization for Autonomous Driving Cars
Jun 01, 2020
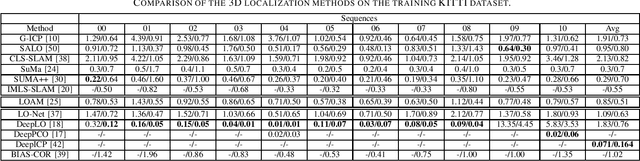

LIDAR sensors are bound to become one the core sensors in achieving full autonomy for self driving cars. LIDARs are able to produce rich, dense and precise spatial data, which can tremendously help in localizing and tracking a moving vehicle. In this paper, we review the latest finding in 3D LIDAR localization for autonomous driving cars, and analyze the results obtained by each method, in an effort to guide the research community towards the path that seems to be the most promising.
Automatic Building and Labeling of HD Maps with Deep Learning
Jun 01, 2020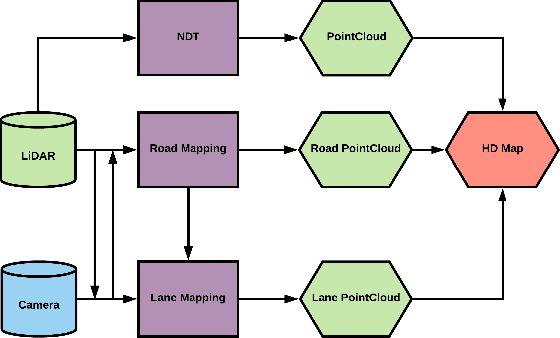
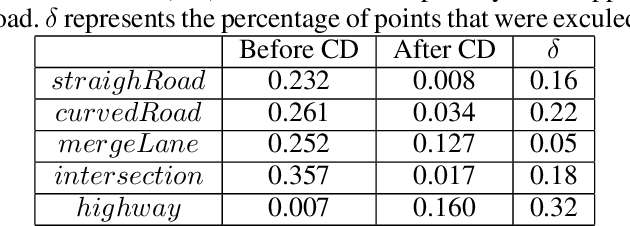
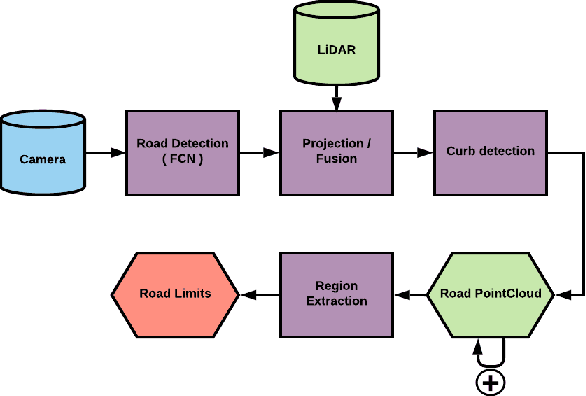
In a world where autonomous driving cars are becoming increasingly more common, creating an adequate infrastructure for this new technology is essential. This includes building and labeling high-definition (HD) maps accurately and efficiently. Today, the process of creating HD maps requires a lot of human input, which takes time and is prone to errors. In this paper, we propose a novel method capable of generating labelled HD maps from raw sensor data. We implemented and tested our methods on several urban scenarios using data collected from our test vehicle. The results show that the pro-posed deep learning based method can produce highly accurate HD maps. This approach speeds up the process of building and labeling HD maps, which can make meaningful contribution to the deployment of autonomous vehicle.
Pedestrian Tracking with Gated Recurrent Units and Attention Mechanisms
May 31, 2020
Pedestrian tracking has long been considered an important problem, especially in security applications. Previously,many approaches have been proposed with various types of sensors. One popular method is Pedestrian Dead Reckoning(PDR) [1] which is based on the inertial measurement unit(IMU) sensor. However PDR is an integration and threshold based method, which suffers from accumulation errors and low accuracy. In this paper, we propose a novel method in which the sensor data is fed into a deep learning model to predict the displacements and orientations of the pedestrian. We also devise a new apparatus to collect and construct databases containing synchronized IMU sensor data and precise locations measured by a LIDAR. The preliminary results are promising, and we plan to push this forward by collecting more data and adapting the deep learning model for all general pedestrian motions.