 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Improving Workers' Safety and Progress Monitoring of Construction Sites Through Construction Site Understanding
Oct 27, 2022



An important component of computer vision research is object detection. In recent years, there has been tremendous progress in the study of construction site images. However, there are obvious problems in construction object detection, including complex backgrounds, varying-sized objects, and poor imaging quality. In the state-of-the-art approaches, elaborate attention mechanisms are developed to handle space-time features, but rarely address the importance of channel-wise feature adjustments. We propose a lightweight Optimized Positioning (OP) module to improve channel relation based on global feature affinity association, which can be used to determine the Optimized weights adaptively for each channel. OP first computes the intermediate optimized position by comparing each channel with the remaining channels for a given set of feature maps. A weighted aggregation of all the channels will then be used to represent each channel. The OP-Net module is a general deep neural network module that can be plugged into any deep neural network. Algorithms that utilize deep learning have demonstrated their ability to identify a wide range of objects from images nearly in real time. Machine intelligence can potentially benefit the construction industry by automatically analyzing productivity and monitoring safety using algorithms that are linked to construction images. The benefits of on-site automatic monitoring are immense when it comes to hazard prevention. Construction monitoring tasks can also be automated once construction objects have been correctly recognized. Object detection task in construction site images is experimented with extensively to demonstrate its efficacy and effectiveness. A benchmark test using SODA demonstrated that our OP-Net was capable of achieving new state-of-the-art performance in accuracy while maintaining a reasonable computational overhead.
Autonomous Resource Management in Construction Companies Using Deep Reinforcement Learning Based on IoT
Aug 17, 2022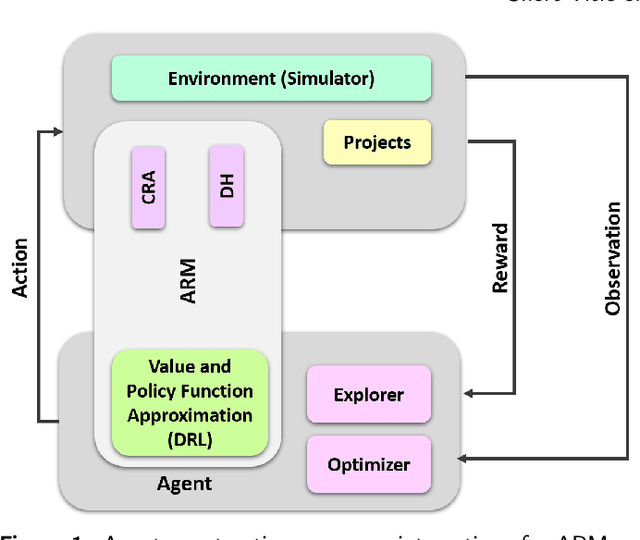
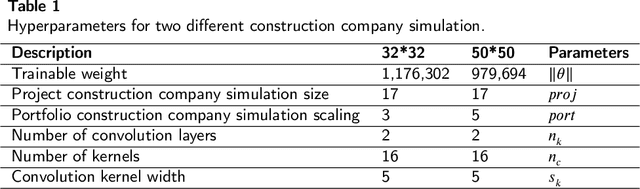
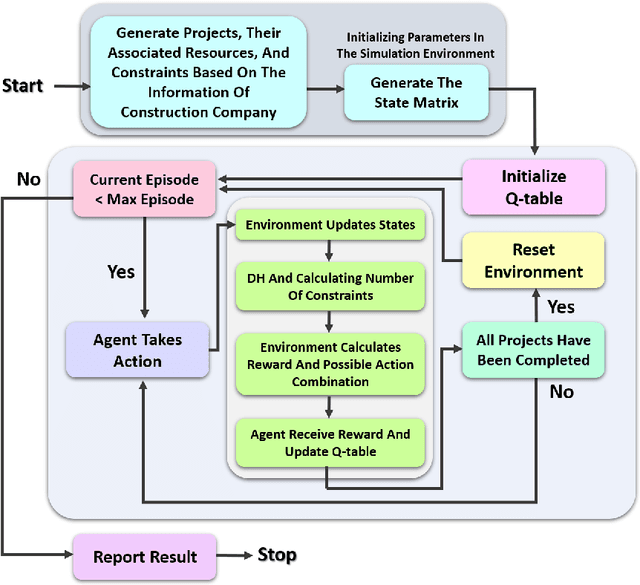
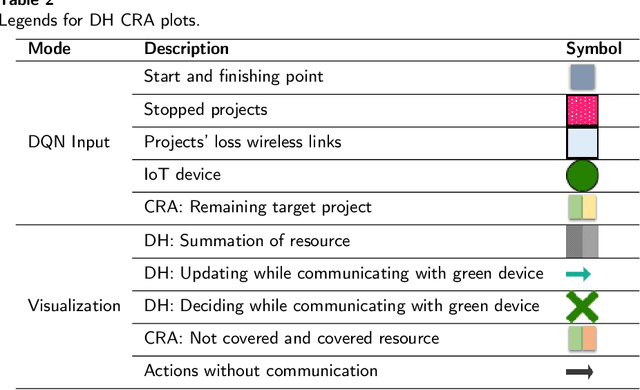
Resource allocation is one of the most critical issues in planning construction projects, due to its direct impact on cost, time, and quality. There are usually specific allocation methods for autonomous resource management according to the projects objectives. However, integrated planning and optimization of utilizing resources in an entire construction organization are scarce. The purpose of this study is to present an automatic resource allocation structure for construction companies based on Deep Reinforcement Learning (DRL), which can be used in various situations. In this structure, Data Harvesting (DH) gathers resource information from the distributed Internet of Things (IoT) sensor devices all over the companys projects to be employed in the autonomous resource management approach. Then, Coverage Resources Allocation (CRA) is compared to the information obtained from DH in which the Autonomous Resource Management (ARM) determines the project of interest. Likewise, Double Deep Q-Networks (DDQNs) with similar models are trained on two distinct assignment situations based on structured resource information of the company to balance objectives with resource constraints. The suggested technique in this paper can efficiently adjust to large resource management systems by combining portfolio information with adopted individual project information. Also, the effects of important information processing parameters on resource allocation performance are analyzed in detail. Moreover, the results of the generalizability of management approaches are presented, indicating no need for additional training when the variables of situations change.
DoubleU-Net++: Architecture with Exploit Multiscale Features for Vertebrae Segmentation
Jan 28, 2022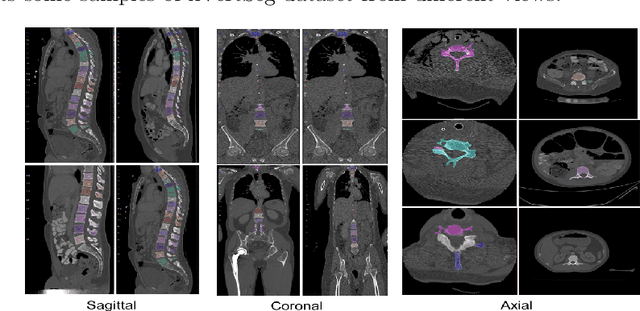
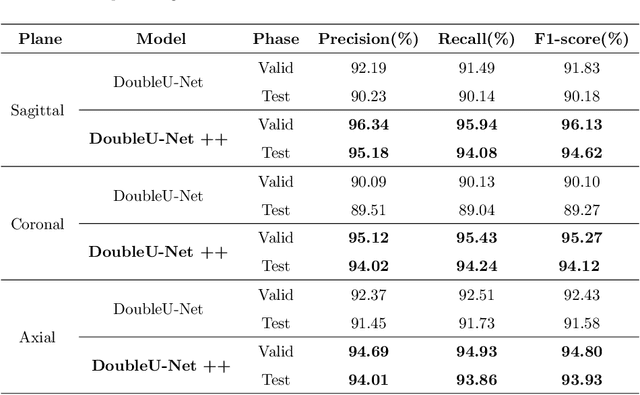
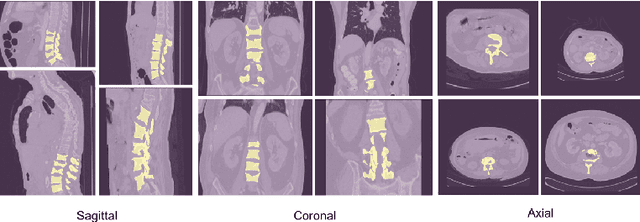
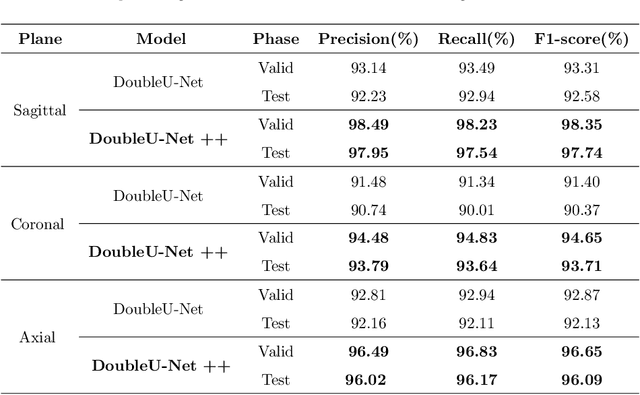
Accurate segmentation of the vertebra is an important prerequisite in various medical applications (E.g. tele surgery) to assist surgeons. Following the successful development of deep neural networks, recent studies have focused on the essential rule of vertebral segmentation. Prior works contain a large number of parameters, and their segmentation is restricted to only one view. Inspired by DoubleU-Net, we propose a novel model named DoubleU-Net++ in which DensNet as feature extractor, special attention module from Convolutional Block Attention on Module (CBAM) and, Pyramid Squeeze Attention (PSA) module are employed to improve extracted features. We evaluate our proposed model on three different views (sagittal, coronal, and axial) of VerSe2020 and xVertSeg datasets. Compared with state-of-the-art studies, our architecture is trained faster and achieves higher precision, recall, and F1-score as evaluation (imporoved by 4-6%) and the result of above 94% for sagittal view and above 94% for both coronal view and above 93% axial view were gained for VerSe2020 dataset, respectively. Also, for xVertSeg dataset, we achieved precision, recall,and F1-score of above 97% for sagittal view, above 93% for coronal view ,and above 96% for axial view.
Construction material classification on imbalanced datasets for construction monitoring automation using Vision Transformer (ViT) architecture
Aug 21, 2021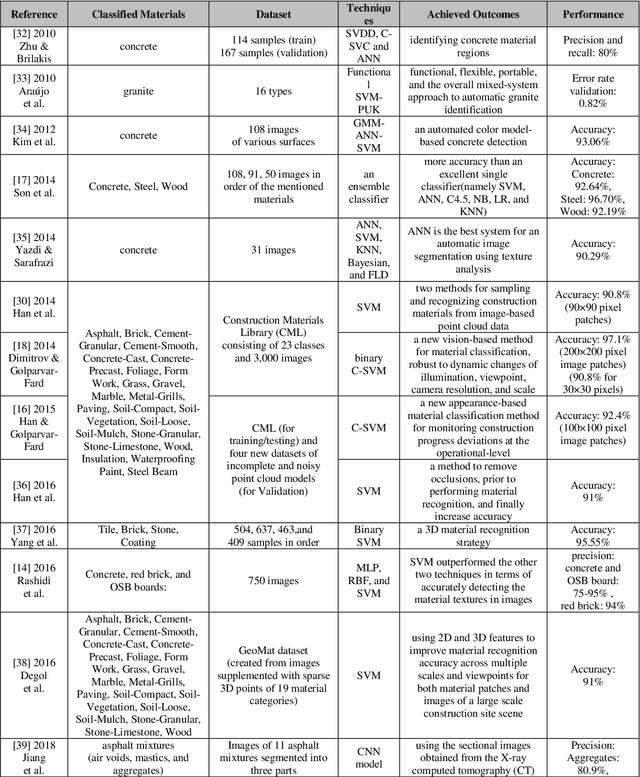
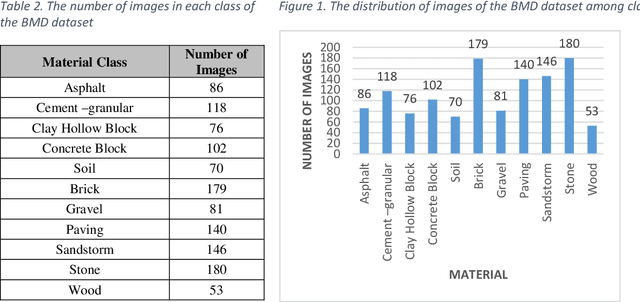
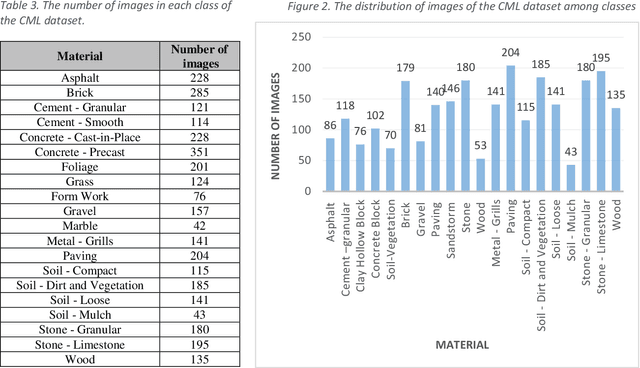
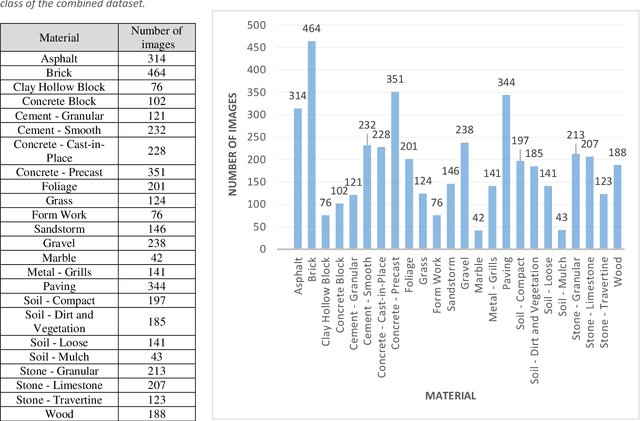
Nowadays, automation is a critical topic due to its significant impacts on the productivity of construction projects. Utilizing automation in this industry brings about great results, such as remarkable improvements in the efficiency, quality, and safety of construction activities. The scope of automation in construction includes a wide range of stages, and monitoring construction projects is no exception. Additionally, it is of great importance in project management since an accurate and timely assessment of project progress enables managers to quickly identify deviations from the schedule and take the required actions at the right time. In this stage, one of the most important tasks is to daily keep track of the project progress, which is very time-consuming and labor-intensive, but automation has facilitated and accelerated this task. It also eliminated or at least decreased the risk of many dangerous tasks. In this way, the first step of construction automation is to detect used materials in a project site automatically. In this paper, a novel deep learning architecture is utilized, called Vision Transformer (ViT), for detecting and classifying construction materials. To evaluate the applicability and performance of the proposed method, it is trained and tested on three large imbalanced datasets, namely Construction Material Library (CML) and Building Material Dataset (BMD), used in the previous papers, as well as a new dataset created by combining them. The achieved results revealed an accuracy of 100 percent in all parameters and also in each material category. It is believed that the proposed method provides a novel and robust tool for detecting and classifying different material types.
Predicting Driver Intention Using Deep Neural Network
Jun 01, 2021

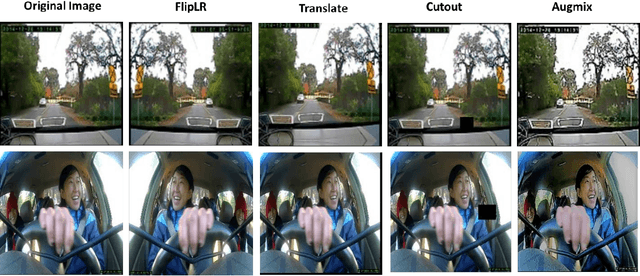

To improve driving safety and avoid car accidents, Advanced Driver Assistance Systems (ADAS) are given significant attention. Recent studies have focused on predicting driver intention as a key part of these systems. In this study, we proposed new framework in which 4 inputs are employed to anticipate diver maneuver using Brain4Cars dataset and the maneuver prediction is achieved from 5, 4, 3, 2, 1 seconds before the actual action occurs. We evaluated our framework in three scenarios: using only 1) inside view 2) outside view and 3) both inside and outside view. We divided the dataset into training, validation and test sets, also K-fold cross validation is utilized. Compared with state-of-the-art studies, our architecture is faster and achieved higher performance in second and third scenario. Accuracy, precision, recall and f1-score as evaluation metrics were utilized and the result of 82.41%, 82.28%, 82,42% and 82.24% for outside view and 98.90%, 98.96%, 98.90% and 98.88% for both inside and outside view were gained, respectively.