 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free MPC for Legged Robots in Static and Dynamic Scenes
Mar 25, 2021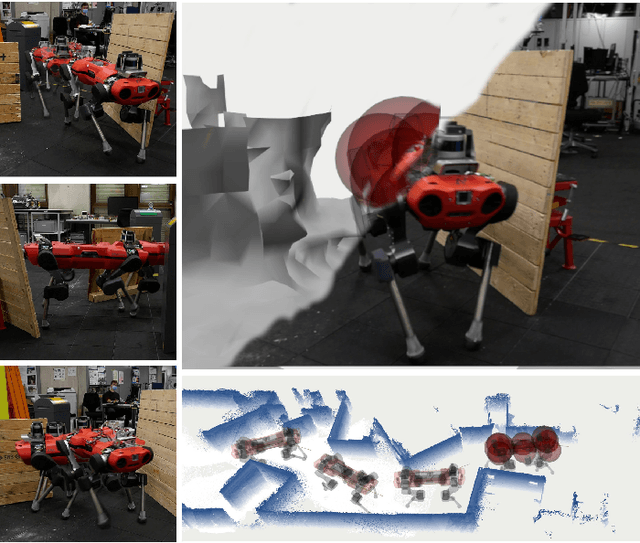
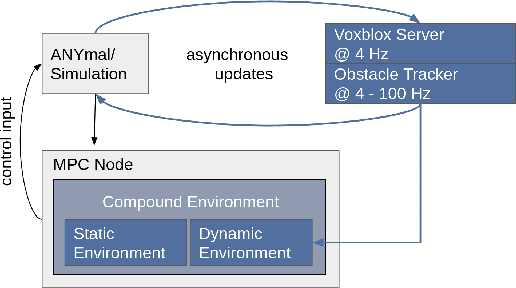
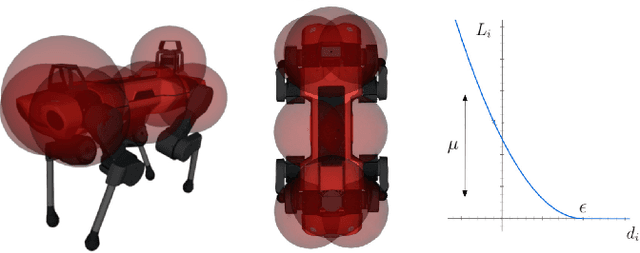
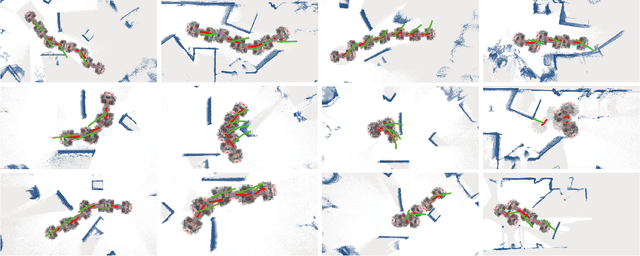
We present a model predictive controller (MPC) that automatically discovers collision-free locomotion while simultaneously taking into account the system dynamics, friction constraints, and kinematic limitations. A relaxed barrier function is added to the optimization's cost function, leading to collision avoidance behavior without increasing the problem's computational complexity. Our holistic approach does not require any heuristics and enables legged robots to find whole-body motions in the presence of static and dynamic obstacles. We use a dynamically generated euclidean signed distance field for static collision checking. Collision checking for dynamic obstacles is modeled with moving cylinders, increasing the responsiveness to fast-moving agents. Furthermore, we include a Kalman filter motion prediction for moving obstacles into our receding horizon planning, enabling the robot to anticipate possible future collisions. Our experiments demonstrate collision-free motions on a quadrupedal robot in challenging indoor environments. The robot handles complex scenes like overhanging obstacles and dynamic agents by exploring motions at the robot's dynamic and kinematic limits.