 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmentation and Characterization of Macerated Fibers and Vessels Using Deep Learning
Jan 30, 2024Purpose: Wood comprises different cell types, such as fibers and vessels, defining its properties. Studying their shape, size, and arrangement in microscopic images is crucial for understanding wood samples. Typically, this involves macerating (soaking) samples in a solution to separate cells, then spreading them on slides for imaging with a microscope that covers a wide area, capturing thousands of cells. However, these cells often cluster and overlap in images, making the segmentation difficult and time-consuming using standard image-processing methods. Results: In this work, we develop an automatic deep learning segmentation approach that utilizes the one-stage YOLOv8 model for fast and accurate fiber and vessel segmentation and characterization in microscopy images. The model can analyze 32640 x 25920 pixels images and demonstrate effective cell detection and segmentation, achieving a mAP_0.5-0.95 of 78 %. To assess the model's robustness, we examined fibers from a genetically modified tree line known for longer fibers. The outcomes were comparable to previous manual measurements. Additionally, we created a user-friendly web application for image analysis and provided the code for use on Google Colab. Conclusion: By leveraging YOLOv8's advances, this work provides a deep learning solution to enable efficient quantification and analysis of wood cells suitable for practical applications.
ToxTrac: a fast and robust software for tracking organisms
Jun 08, 2017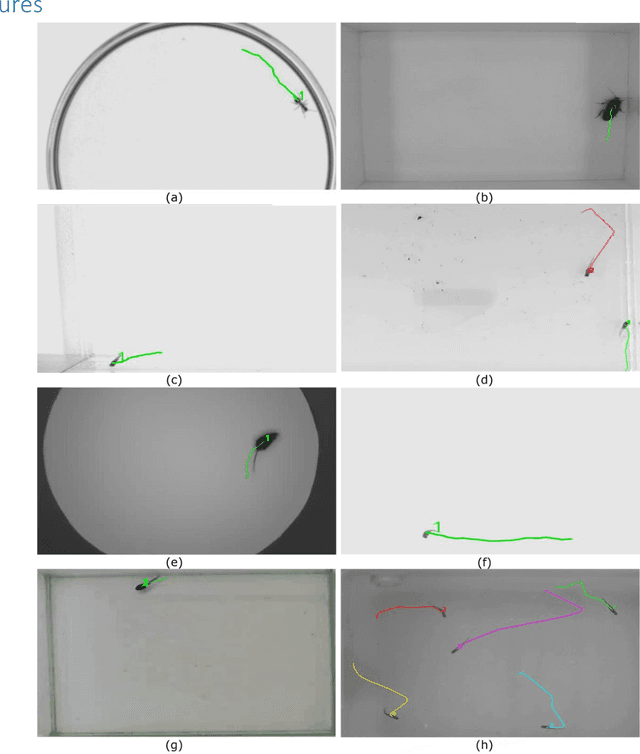
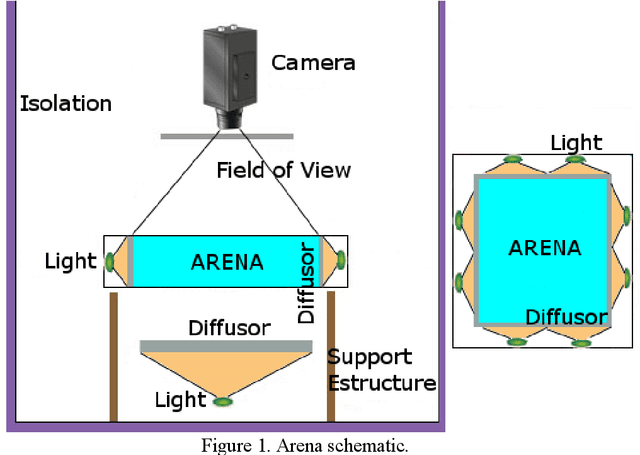
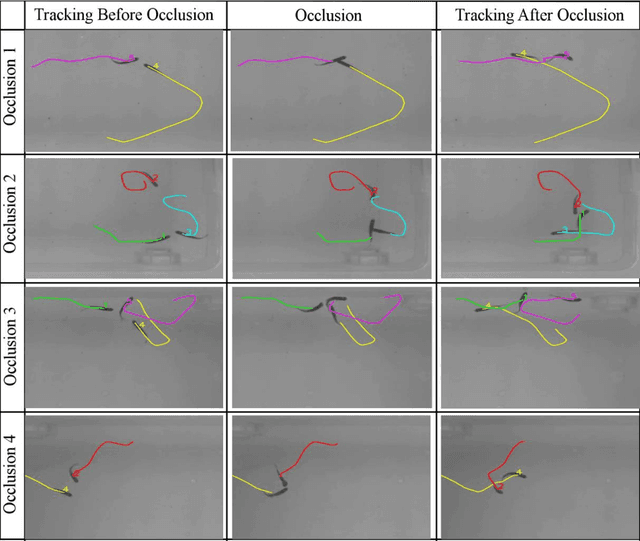
1. Behavioral analysis based on video recording is becoming increasingly popular within research fields such as; ecology, medicine, ecotoxicology, and toxicology. However, the programs available to analyze the data, which are; free of cost, user-friendly, versatile, robust, fast and provide reliable statistics for different organisms (invertebrates, vertebrates and mammals) are significantly limited. 2. We present an automated open-source executable software (ToxTrac) for image-based tracking that can simultaneously handle several organisms monitored in a laboratory environment. We compare the performance of ToxTrac with current accessible programs on the web. 3. The main advantages of ToxTrac are: i) no specific knowledge of the geometry of the tracked bodies is needed; ii) processing speed, ToxTrac can operate at a rate >25 frames per second in HD videos using modern desktop computers; iii) simultaneous tracking of multiple organisms in multiple arenas; iv) integrated distortion correction and camera calibration; v) robust against false positives; vi) preservation of individual identification if crossing occurs; vii) useful statistics and heat maps in real scale are exported in: image, text and excel formats. 4. ToxTrac can be used for high speed tracking of insects, fish, rodents or other species, and provides useful locomotor information. We suggest using ToxTrac for future studies of animal behavior independent of research area. Download ToxTrac here: https://toxtrac.sourceforge.io
UmUTracker: A versatile MATLAB program for automated particle tracking of 2D light microscopy or 3D digital holography data
Apr 21, 2017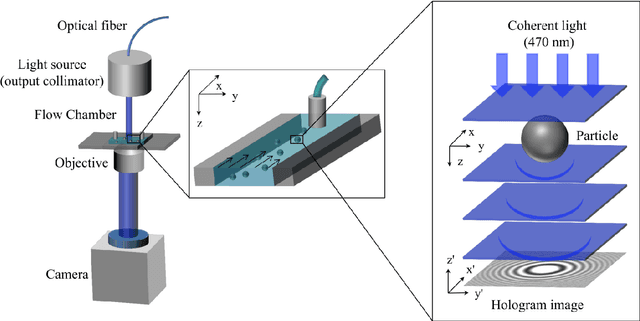
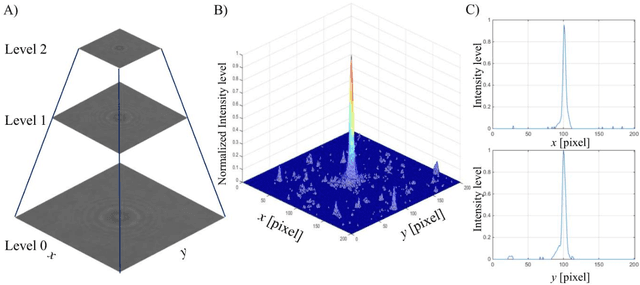
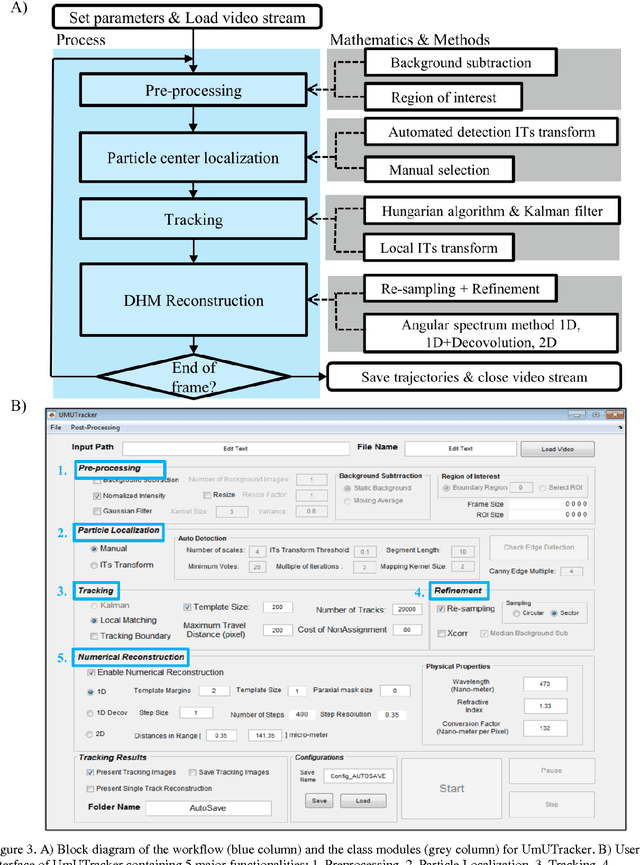
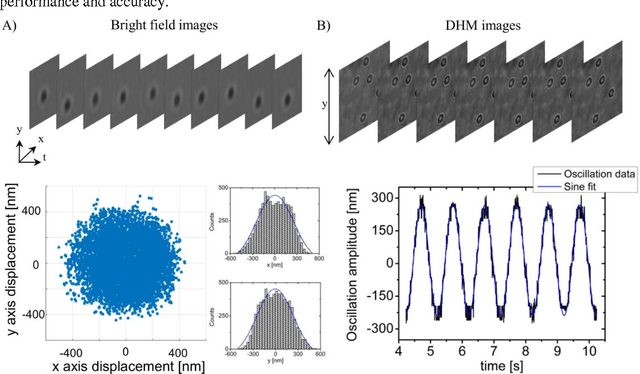
We present a versatile and fast MATLAB program (UmUTracker) that automatically detects and tracks particles by analyzing video sequences acquired by either light microscopy or digital in-line holographic microscopy. Our program detects the 2D lateral positions of particles with an algorithm based on the isosceles triangle transform, and reconstructs their 3D axial positions by a fast implementation of the Rayleigh-Sommerfeld model using a radial intensity profile. To validate the accuracy and performance of our program, we first track the 2D position of polystyrene particles using bright field and digital holographic microscopy. Second, we determine the 3D particle position by analyzing synthetic and experimentally acquired holograms. Finally, to highlight the full program features, we profile the microfluidic flow in a 100 micrometer high flow chamber. This result agrees with computational fluid dynamic simulations. On a regular desktop computer UmUTracker can detect, analyze, and track multiple particles at 5 frames per second for a template size of 201 x 201 in a 1024 x 1024 image. To enhance usability and to make it easy to implement new functions we used object-oriented programming. UmUTracker is suitable for studies related to: particle dynamics, cell localization, colloids and microfluidic flow measurement.
A robust particle detection algorithm based on symmetry
May 11, 2016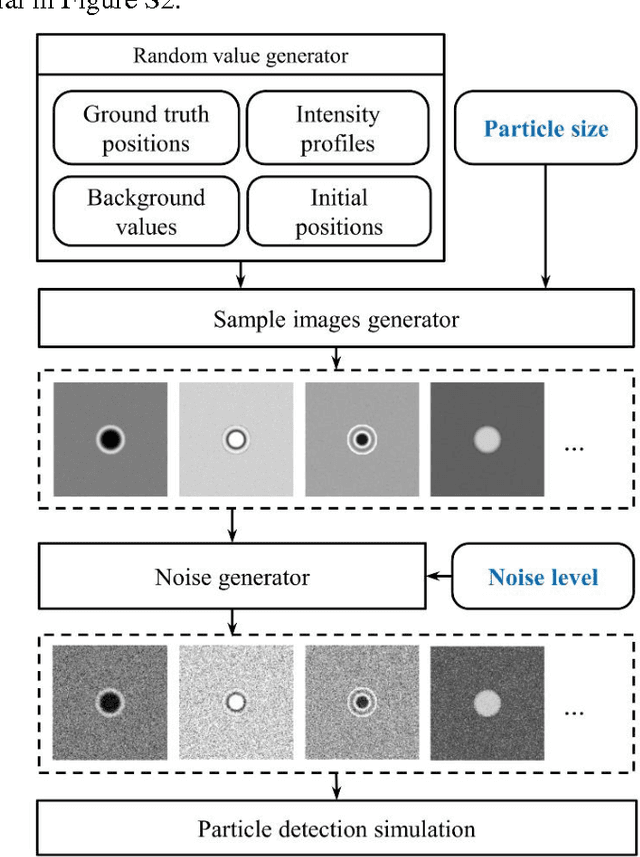
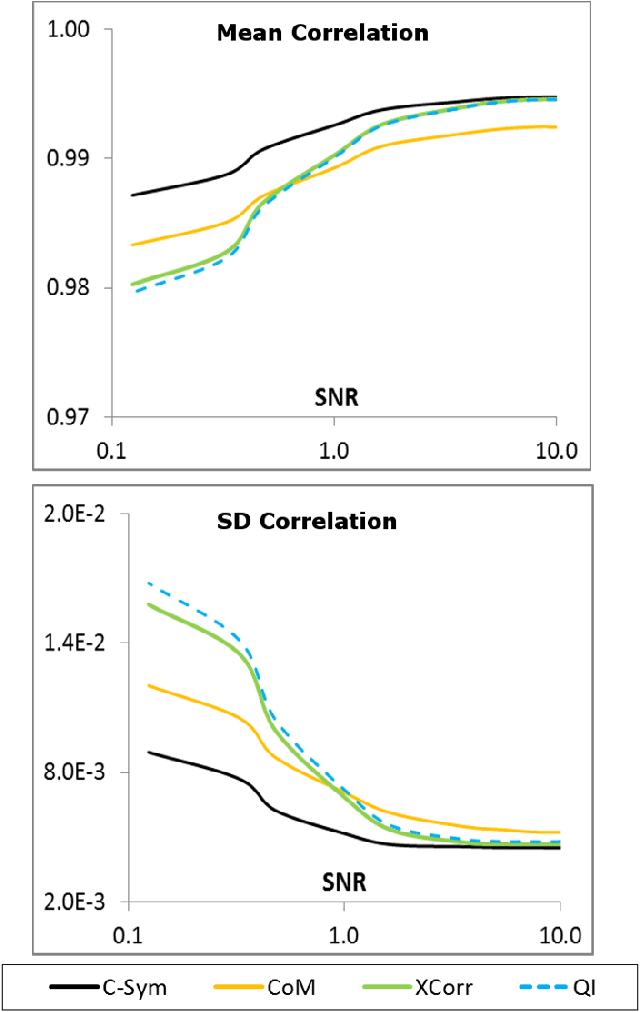
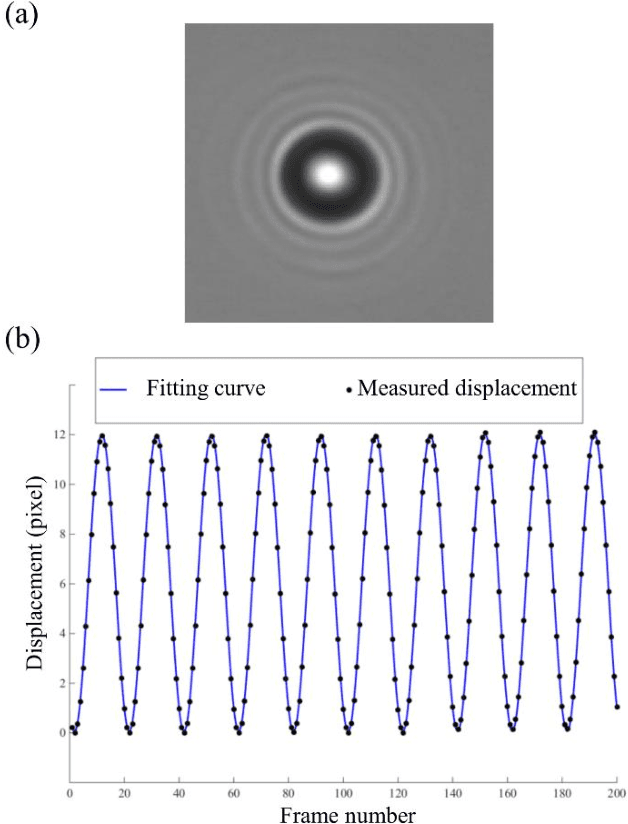
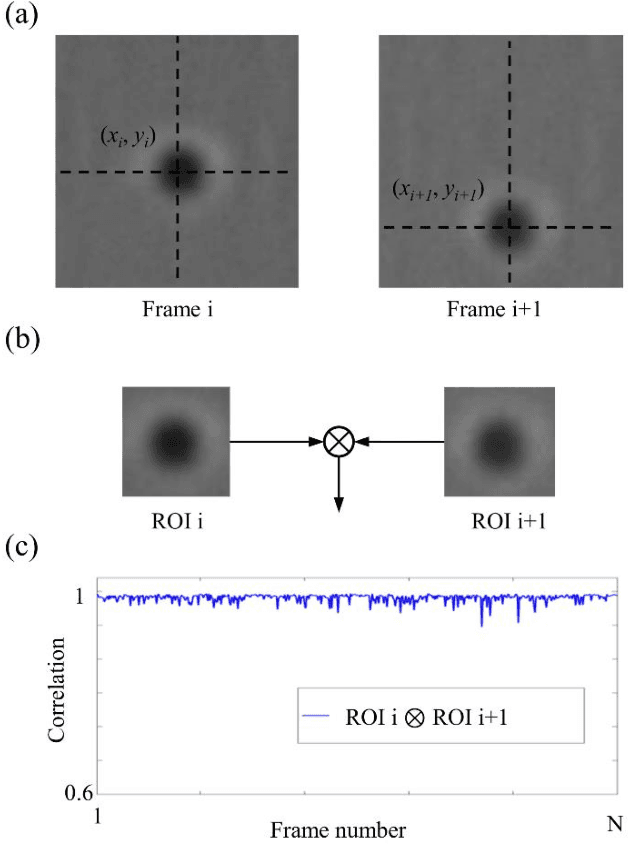
Particle tracking is common in many biophysical, ecological, and micro-fluidic applications. Reliable tracking information is heavily dependent on of the system under study and algorithms that correctly determines particle position between images. However, in a real environmental context with the presence of noise including particular or dissolved matter in water, and low and fluctuating light conditions, many algorithms fail to obtain reliable information. We propose a new algorithm, the Circular Symmetry algorithm (C-Sym), for detecting the position of a circular particle with high accuracy and precision in noisy conditions. The algorithm takes advantage of the spatial symmetry of the particle allowing for subpixel accuracy. We compare the proposed algorithm with four different methods using both synthetic and experimental datasets. The results show that C-Sym is the most accurate and precise algorithm when tracking micro-particles in all tested conditions and it has the potential for use in applications including tracking biota in their environment.
Circle detection using isosceles triangles sampling
Nov 02, 2015Detection of circular objects in digital images is an important problem in several vision applications. Circle detection using randomized sampling has been developed in recent years to reduce the computational intensity. Randomized sampling, however, is sensitive to noise that can lead to reduced accuracy and false-positive candidates. This paper presents a new circle detection method based upon randomized isosceles triangles sampling to improve the robustness of randomized circle detection in noisy conditions. It is shown that the geometrical property of isosceles triangles provide a robust criterion to find relevant edge pixels and thereby efficiently provide an estimation of the circle center and radii. The estimated results given by the isosceles triangles sampling from each connected component of edge map were analyzed using a simple clustering approach for efficiency. To further improve on the accuracy we applied a two-step refinement process using chords and linear error compensation with gradient information of the edge pixels. Extensive experiments using both synthetic and real images were presented and results were compared to leading state-of-the-art algorithms and showed that the proposed algorithm: are efficient in finding circles with a low number of iterations; has high rejection rate of false-positive circle candidates; and has high robustness against noise, making it adaptive and useful in many vision applications.