 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Anomaly Detection in In-Vehicle Networks
Sep 11, 2024

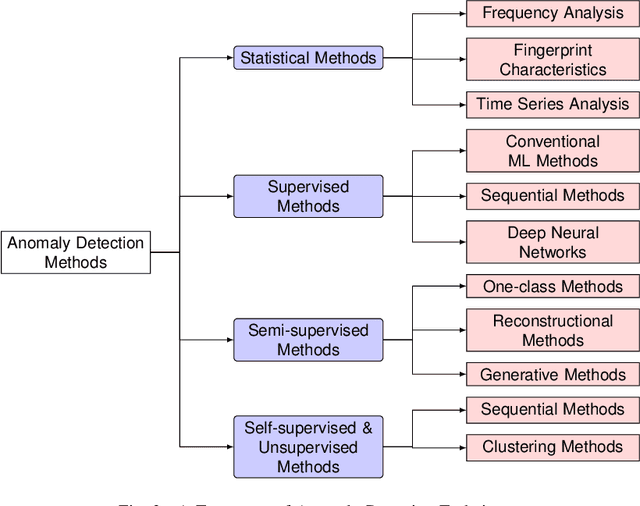

Modern vehicles are equipped with Electronic Control Units (ECU) that are used for controlling important vehicle functions including safety-critical operations. ECUs exchange information via in-vehicle communication buses, of which the Controller Area Network (CAN bus) is by far the most widespread representative. Problems that may occur in the vehicle's physical parts or malicious attacks may cause anomalies in the CAN traffic, impairing the correct vehicle operation. Therefore, the detection of such anomalies is vital for vehicle safety. This paper reviews the research on anomaly detection for in-vehicle networks, more specifically for the CAN bus. Our main focus is the evaluation of methods used for CAN bus anomaly detection together with the datasets used in such analysis. To provide the reader with a more comprehensive understanding of the subject, we first give a brief review of related studies on time series-based anomaly detection. Then, we conduct an extensive survey of recent deep learning-based techniques as well as conventional techniques for CAN bus anomaly detection. Our comprehensive analysis delves into anomaly detection algorithms employed in in-vehicle networks, specifically focusing on their learning paradigms, inherent strengths, and weaknesses, as well as their efficacy when applied to CAN bus datasets. Lastly, we highlight challenges and open research problems in CAN bus anomaly detection.
Large-Scale Cell-Level Quality of Service Estimation on 5G Networks Using Machine Learning Techniques
Jan 06, 2023This study presents a general machine learning framework to estimate the traffic-measurement-level experience rate at given throughput values in the form of a Key Performance Indicator for the cells on base stations across various cities, using busy-hour counter data, and several technical parameters together with the network topology. Relying on feature engineering techniques, scores of additional predictors are proposed to enhance the effects of raw correlated counter values over the corresponding targets, and to represent the underlying interactions among groups of cells within nearby spatial locations effectively. An end-to-end regression modeling is applied on the transformed data, with results presented on unseen cities of varying sizes.