 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn End-to-end Point of Interest Conflation Framework
Sep 13, 2021



Point of interest (POI) data serves as a valuable source of semantic information for places of interest and has many geospatial applications in real estate, transportation, and urban planning. With the availability of different data sources, POI conflation serves as a valuable technique for enriching data quality and coverage by merging the POI data from multiple sources. This study proposes a novel end-to-end POI conflation framework consisting of six steps, starting with data procurement, schema standardisation, taxonomy mapping, POI matching, POI unification, and data verification. The feasibility of the proposed framework was demonstrated in a case study conducted in the eastern region of Singapore, where the POI data from five data sources was conflated to form a unified POI dataset. Based on the evaluation conducted, the resulting unified dataset was found to be more comprehensive and complete than any of the five POI data sources alone. Furthermore, the proposed approach for identifying POI matches between different data sources outperformed all baseline approaches with a matching accuracy of 97.6% with an average run time below 3 minutes when matching over 12,000 POIs to result in 8,699 unique POIs, thereby demonstrating the framework's scalability for large scale implementation in dense urban contexts.
Image-based Vehicle Analysis using Deep Neural Network: A Systematic Study
Aug 07, 2016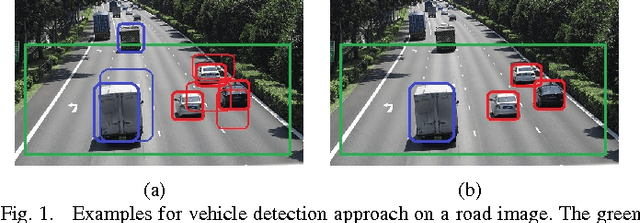
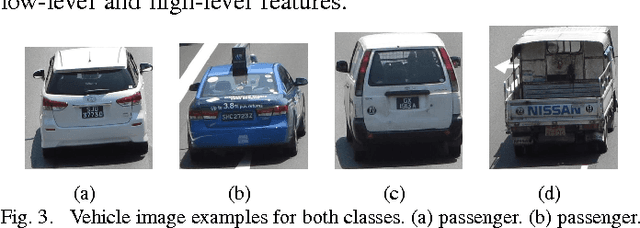
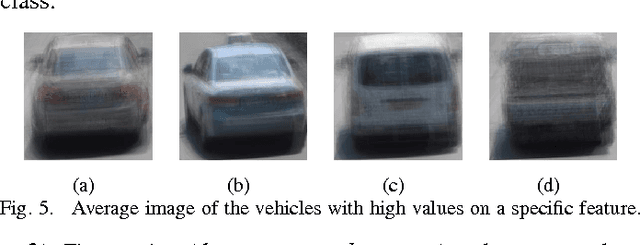
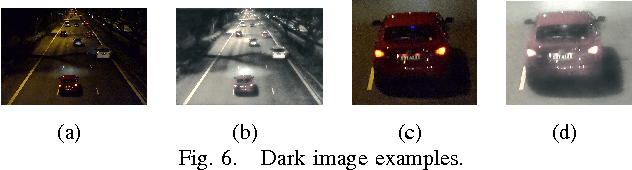
We address the vehicle detection and classification problems using Deep Neural Networks (DNNs) approaches. Here we answer to questions that are specific to our application including how to utilize DNN for vehicle detection, what features are useful for vehicle classification, and how to extend a model trained on a limited size dataset, to the cases of extreme lighting condition. Answering these questions we propose our approach that outperforms state-of-the-art methods, and achieves promising results on image with extreme lighting conditions.