 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiverse, Top-k, and Top-Quality Planning Over Simulators
Aug 25, 2023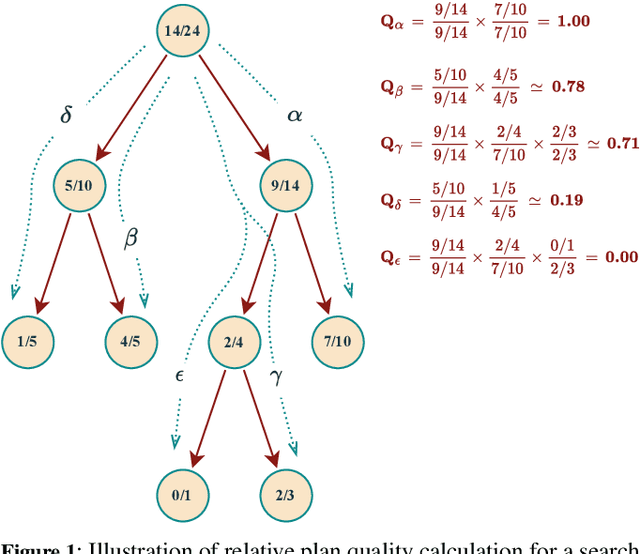
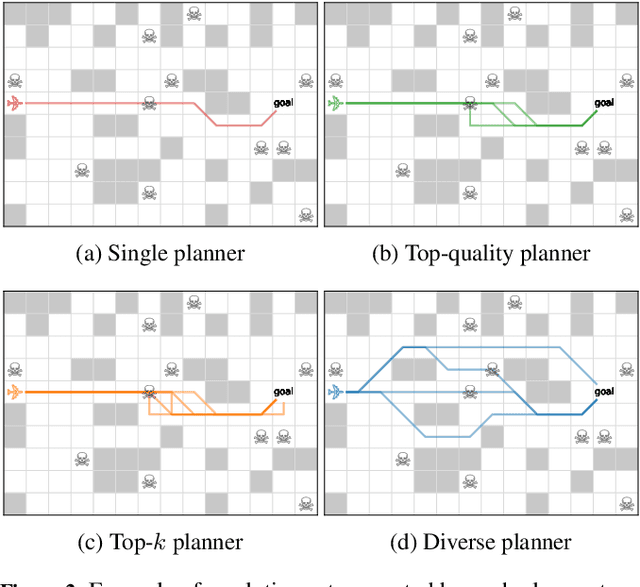

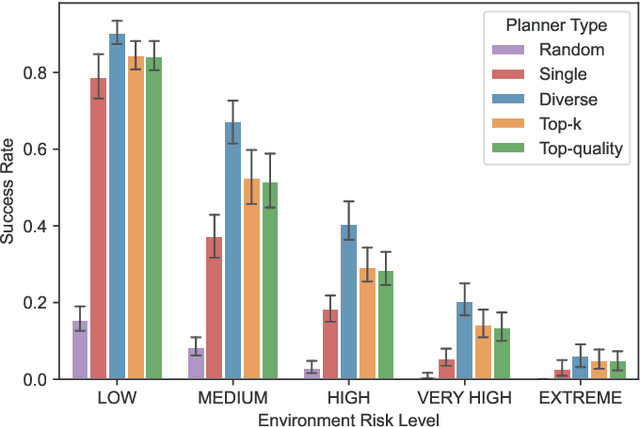
Diverse, top-k, and top-quality planning are concerned with the generation of sets of solutions to sequential decision problems. Previously this area has been the domain of classical planners that require a symbolic model of the problem instance. This paper proposes a novel alternative approach that uses Monte Carlo Tree Search (MCTS), enabling application to problems for which only a black-box simulation model is available. We present a procedure for extracting bounded sets of plans from pre-generated search trees in best-first order, and a metric for evaluating the relative quality of paths through a search tree. We demonstrate this approach on a path-planning problem with hidden information, and suggest adaptations to the MCTS algorithm to increase the diversity of generated plans. Our results show that our method can generate diverse and high-quality plan sets in domains where classical planners are not applicable.
Multi-Agent Simulation for AI Behaviour Discovery in Operations Research
Aug 30, 2021
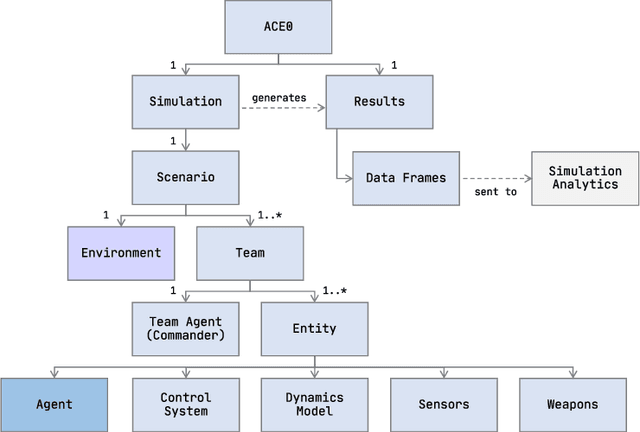
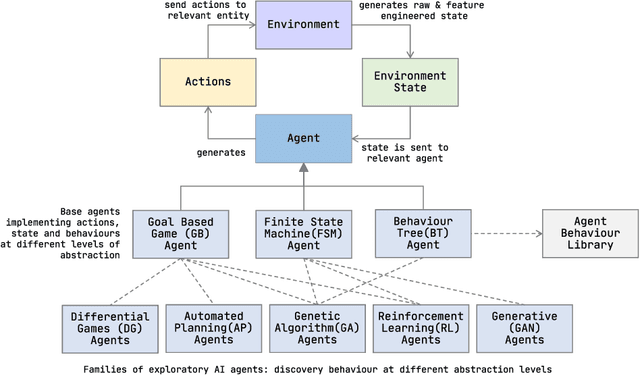
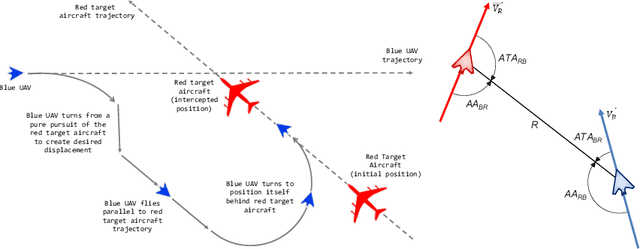
We describe ACE0, a lightweight platform for evaluating the suitability and viability of AI methods for behaviour discovery in multiagent simulations. Specifically, ACE0 was designed to explore AI methods for multi-agent simulations used in operations research studies related to new technologies such as autonomous aircraft. Simulation environments used in production are often high-fidelity, complex, require significant domain knowledge and as a result have high R&D costs. Minimal and lightweight simulation environments can help researchers and engineers evaluate the viability of new AI technologies for behaviour discovery in a more agile and potentially cost effective manner. In this paper we describe the motivation for the development of ACE0.We provide a technical overview of the system architecture, describe a case study of behaviour discovery in the aerospace domain, and provide a qualitative evaluation of the system. The evaluation includes a brief description of collaborative research projects with academic partners, exploring different AI behaviour discovery methods.