 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Calibration of Mobile Manipulator Kinematic and Sensor Extrinsic Parameters Through Contact-Based Interaction
Oct 22, 2018
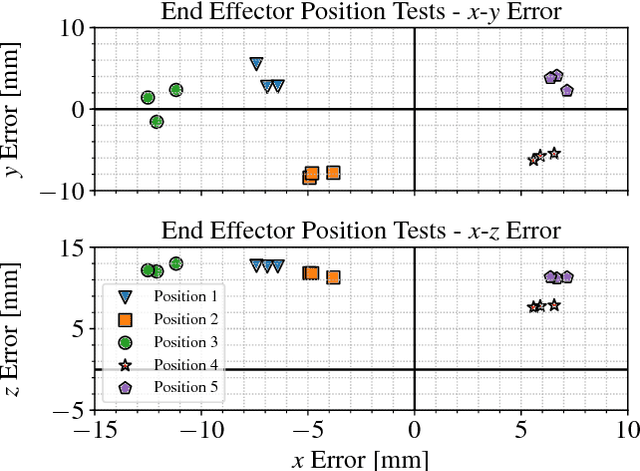
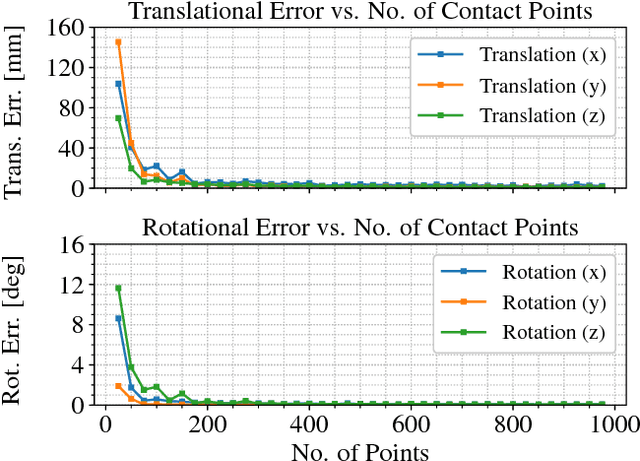
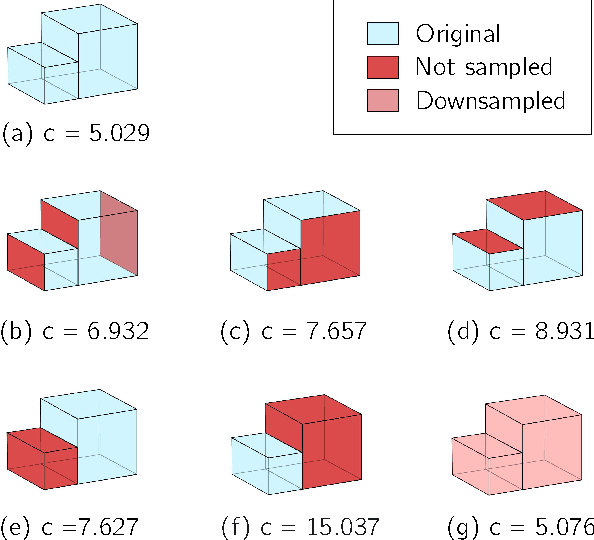
We present a novel approach for mobile manipulator self-calibration using contact information. Our method, based on point cloud registration, is applied to estimate the extrinsic transform between a fixed vision sensor mounted on a mobile base and an end effector. Beyond sensor calibration, we demonstrate that the method can be extended to include manipulator kinematic model parameters, which involves a non-rigid registration process. Our procedure uses on-board sensing exclusively and does not rely on any external measurement devices, fiducial markers, or calibration rigs. Further, it is fully automatic in the general case. We experimentally validate the proposed method on a custom mobile manipulator platform, and demonstrate centimetre-level post-calibration accuracy in positioning of the end effector using visual guidance only. We also discuss the stability properties of the registration algorithm, in order to determine the conditions under which calibration is possible.