 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresentation, learning, and planning algorithms for geometric task and motion planning
Mar 09, 2022
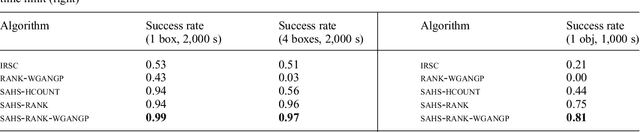


We present a framework for learning to guide geometric task and motion planning (GTAMP). GTAMP is a subclass of task and motion planning in which the goal is to move multiple objects to target regions among movable obstacles. A standard graph search algorithm is not directly applicable, because GTAMP problems involve hybrid search spaces and expensive action feasibility checks. To handle this, we introduce a novel planner that extends basic heuristic search with random sampling and a heuristic function that prioritizes feasibility checking on promising state action pairs. The main drawback of such pure planners is that they lack the ability to learn from planning experience to improve their efficiency. We propose two learning algorithms to address this. The first is an algorithm for learning a rank function that guides the discrete task level search, and the second is an algorithm for learning a sampler that guides the continuous motionlevel search. We propose design principles for designing data efficient algorithms for learning from planning experience and representations for effective generalization. We evaluate our framework in challenging GTAMP problems, and show that we can improve both planning and data efficiency