 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Unit Floor Plan Recognition and Reconstruction Using Improved Semantic Segmentation of Raster-Wise Floor Plans
Aug 02, 2024



Digital twins have a major potential to form a significant part of urban management in emergency planning, as they allow more efficient designing of the escape routes, better orientation in exceptional situations, and faster rescue intervention. Nevertheless, creating the twins still remains a largely manual effort, due to a lack of 3D-representations, which are available only in limited amounts for some new buildings. Thus, in this paper we aim to synthesize 3D information from commonly available 2D architectural floor plans. We propose two novel pixel-wise segmentation methods based on the MDA-Unet and MACU-Net architectures with improved skip connections, an attention mechanism, and a training objective together with a reconstruction part of the pipeline, which vectorizes the segmented plans to create a 3D model. The proposed methods are compared with two other state-of-the-art techniques and several benchmark datasets. On the commonly used CubiCasa benchmark dataset, our methods have achieved the mean F1 score of 0.86 over five examined classes, outperforming the other pixel-wise approaches tested. We have also made our code publicly available to support research in the field.
Point cloud obstacle detection with the map filtration
Apr 11, 2024Obstacle detection is one of the basic tasks of a robot movement in an unknown environment. The use of a LiDAR (Light Detection And Ranging) sensor allows one to obtain a point cloud in the vicinity of the sensor. After processing this data, obstacles can be found and recorded on a map. For this task, I present a pipeline capable of detecting obstacles even on a computationally limited device. The pipeline was also tested on a real robot and qualitatively evaluated on a dataset, which was collected in Brno University of Technology lab. Time consumption was recorded and compared with 3D object detectors.
Machine Learning and Computer Vision Techniques in Bee Monitoring Applications
Jul 29, 2022



Machine learning and computer vision are dynamically growing fields, which have proven to be able to solve very complex tasks. They could also be used for the monitoring of the honeybee colonies and for the inspection of their health state, which could identify potentially dangerous states before the situation is critical, or to better plan periodic bee colony inspections and therefore save significant costs. In this paper, we present an overview of the state-of-the-art computer vision and machine learning applications used for bee monitoring. We also demonstrate the potential of those methods as an example of an automated bee counter algorithm. The paper is aimed at veterinary and apidology professionals and experts, who might not be familiar with machine learning to introduce to them its possibilities, therefore each family of applications is opened by a brief theoretical introduction and motivation related to its base method. We hope that this paper will inspire other scientists to use the machine learning techniques for other applications in bee monitoring.
Visual diagnosis of the Varroa destructor parasitic mite in honeybees using object detector techniques
Feb 26, 2021
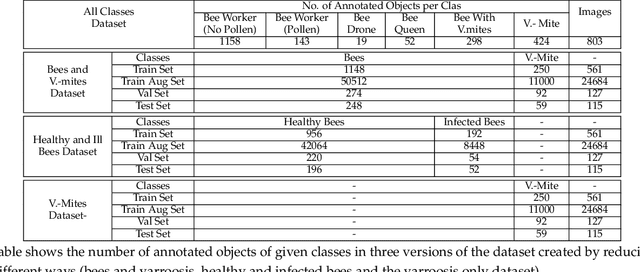
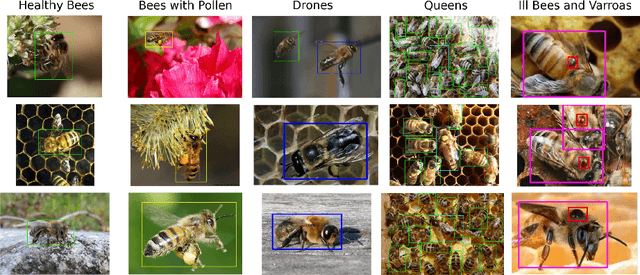
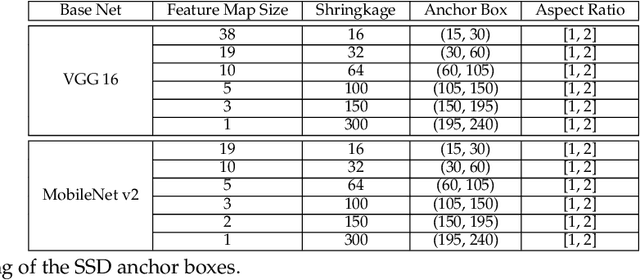
The Varroa destructor mite is one of the most dangerous Honey Bee (Apis mellifera) parasites worldwide and the bee colonies have to be regularly monitored in order to control its spread. Here we present an object detector based method for health state monitoring of bee colonies. This method has the potential for online measurement and processing. In our experiment, we compare the YOLO and SSD object detectors along with the Deep SVDD anomaly detector. Based on the custom dataset with 600 ground-truth images of healthy and infected bees in various scenes, the detectors reached a high F1 score up to 0.874 in the infected bee detection and up to 0.727 in the detection of the Varroa Destructor mite itself. The results demonstrate the potential of this approach, which will be later used in the real-time computer vision based honey bee inspection system. To the best of our knowledge, this study is the first one using object detectors for this purpose. We expect that performance of those object detectors will enable us to inspect the health status of the honey bee colonies.