 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscriminative Correlation Filter with Channel and Spatial Reliability
Jan 17, 2018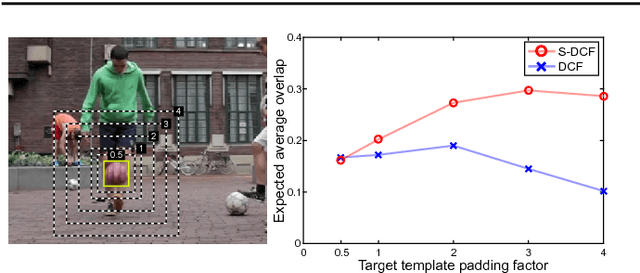



Short-term tracking is an open and challenging problem for which discriminative correlation filters (DCF) have shown excellent performance. We introduce the channel and spatial reliability concepts to DCF tracking and provide a novel learning algorithm for its efficient and seamless integration in the filter update and the tracking process. The spatial reliability map adjusts the filter support to the part of the object suitable for tracking. This both allows to enlarge the search region and improves tracking of non-rectangular objects. Reliability scores reflect channel-wise quality of the learned filters and are used as feature weighting coefficients in localization. Experimentally, with only two simple standard features, HoGs and Colornames, the novel CSR-DCF method -- DCF with Channel and Spatial Reliability -- achieves state-of-the-art results on VOT 2016, VOT 2015 and OTB100. The CSR-DCF runs in real-time on a CPU.
TraX: The visual Tracking eXchange Protocol and Library
May 12, 2017



In this paper we address the problem of developing on-line visual tracking algorithms. We present a specialized communication protocol that serves as a bridge between a tracker implementation and utilizing application. It decouples development of algorithms and application, encouraging re-usability. The primary use case is algorithm evaluation where the protocol facilitates more complex evaluation scenarios that are used nowadays thus pushing forward the field of visual tracking. We present a reference implementation of the protocol that makes it easy to use in several popular programming languages and discuss where the protocol is already used and some usage scenarios that we envision for the future.
Deformable Parts Correlation Filters for Robust Visual Tracking
May 12, 2016



Deformable parts models show a great potential in tracking by principally addressing non-rigid object deformations and self occlusions, but according to recent benchmarks, they often lag behind the holistic approaches. The reason is that potentially large number of degrees of freedom have to be estimated for object localization and simplifications of the constellation topology are often assumed to make the inference tractable. We present a new formulation of the constellation model with correlation filters that treats the geometric and visual constraints within a single convex cost function and derive a highly efficient optimization for MAP inference of a fully-connected constellation. We propose a tracker that models the object at two levels of detail. The coarse level corresponds a root correlation filter and a novel color model for approximate object localization, while the mid-level representation is composed of the new deformable constellation of correlation filters that refine the object location. The resulting tracker is rigorously analyzed on a highly challenging OTB, VOT2014 and VOT2015 benchmarks, exhibits a state-of-the-art performance and runs in real-time.
Visual object tracking performance measures revisited
Mar 07, 2016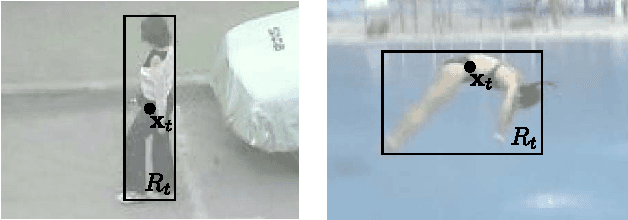
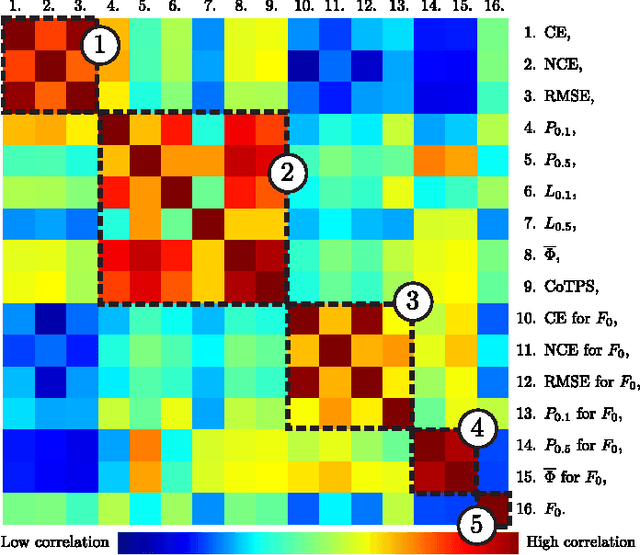
The problem of visual tracking evaluation is sporting a large variety of performance measures, and largely suffers from lack of consensus about which measures should be used in experiments. This makes the cross-paper tracker comparison difficult. Furthermore, as some measures may be less effective than others, the tracking results may be skewed or biased towards particular tracking aspects. In this paper we revisit the popular performance measures and tracker performance visualizations and analyze them theoretically and experimentally. We show that several measures are equivalent from the point of information they provide for tracker comparison and, crucially, that some are more brittle than the others. Based on our analysis we narrow down the set of potential measures to only two complementary ones, describing accuracy and robustness, thus pushing towards homogenization of the tracker evaluation methodology. These two measures can be intuitively interpreted and visualized and have been employed by the recent Visual Object Tracking (VOT) challenges as the foundation for the evaluation methodology.