 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuzzyLogic.jl: a Flexible Library for Efficient and Productive Fuzzy Inference
Jun 17, 2023

This paper introduces \textsc{FuzzyLogic.jl}, a Julia library to perform fuzzy inference. The library is fully open-source and released under a permissive license. The core design principles of the library are: user-friendliness, flexibility, efficiency and interoperability. Particularly, our library is easy to use, allows to specify fuzzy systems in an expressive yet concise domain specific language, has several visualization tools, supports popular inference systems like Mamdani, Sugeno and Type-2 systems, can be easily expanded with custom user settings or algorithms and can perform fuzzy inference efficiently. It also allows reading fuzzy models from other formats such as Matlab .fis, FCL or FML. In this paper, we describe the library main features and benchmark it with a few examples, showing it achieves significant speedup compared to the Matlab fuzzy toolbox.
TBPos: Dataset for Large-Scale Precision Visual Localization
Feb 20, 2023



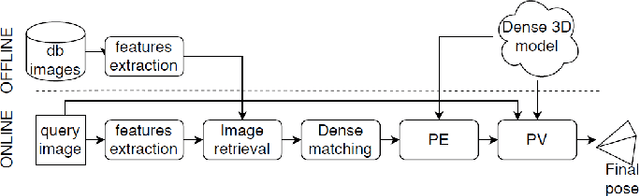
Image based localization is a classical computer vision challenge, with several well-known datasets. Generally, datasets consist of a visual 3D database that captures the modeled scenery, as well as query images whose 3D pose is to be discovered. Usually the query images have been acquired with a camera that differs from the imaging hardware used to collect the 3D database; consequently, it is hard to acquire accurate ground truth poses between query images and the 3D database. As the accuracy of visual localization algorithms constantly improves, precise ground truth becomes increasingly important. This paper proposes TBPos, a novel large-scale visual dataset for image based positioning, which provides query images with fully accurate ground truth poses: both the database images and the query images have been derived from the same laser scanner data. In the experimental part of the paper, the proposed dataset is evaluated by means of an image-based localization pipeline.
Multiple Offsets Multilateration: a new paradigm for sensor network calibration with unsynchronized reference nodes
May 23, 2022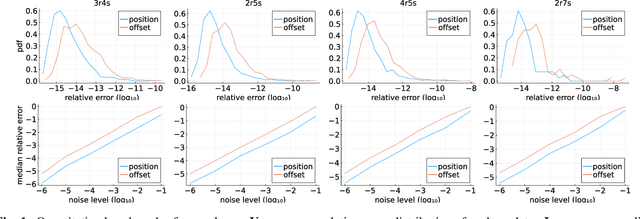
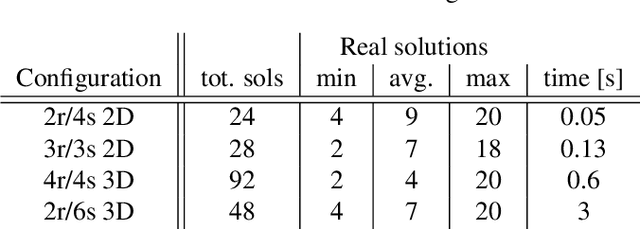
Positioning using wave signal measurements is used in several applications, such as GPS systems, structure from sound and Wifi based positioning. Mathematically, such problems require the computation of the positions of receivers and/or transmitters as well as time offsets if the devices are unsynchronized. In this paper, we expand the previous state-of-the-art on positioning formulations by introducing Multiple Offsets Multilateration (MOM), a new mathematical framework to compute the receivers positions with pseudoranges from unsynchronized reference transmitters at known positions. This could be applied in several scenarios, for example structure from sound and positioning with LEO satellites. We mathematically describe MOM, determining how many receivers and transmitters are needed for the network to be solvable, a study on the number of possible distinct solutions is presented and stable solvers based on homotopy continuation are derived. The solvers are shown to be efficient and robust to noise both for synthetic and real audio data.
Can You Trust Your Pose? Confidence Estimation in Visual Localization
Oct 01, 2020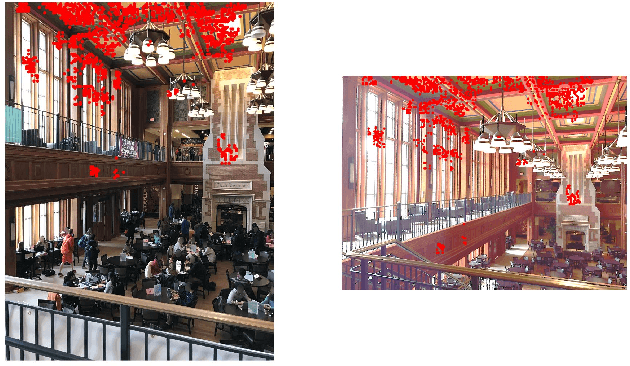
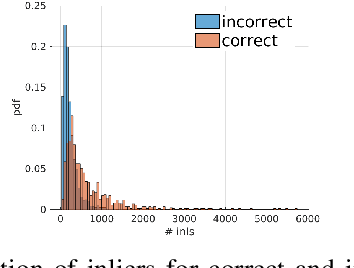
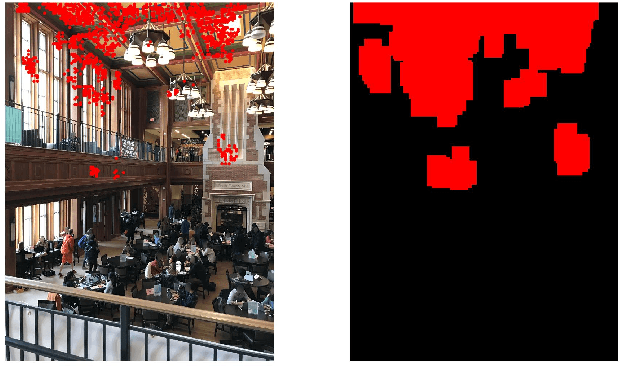
Camera pose estimation in large-scale environments is still an open question and, despite recent promising results, it may still fail in some situations. The research so far has focused on improving subcomponents of estimation pipelines, to achieve more accurate poses. However, there is no guarantee for the result to be correct, even though the correctness of pose estimation is critically important in several visual localization applications,such as in autonomous navigation. In this paper we bring to attention a novel research question, pose confidence estimation,where we aim at quantifying how reliable the visually estimated pose is. We develop a novel confidence measure to fulfil this task and show that it can be flexibly applied to different datasets,indoor or outdoor, and for various visual localization pipelines.We also show that the proposed techniques can be used to accomplish a secondary goal: improving the accuracy of existing pose estimation pipelines. Finally, the proposed approach is computationally light-weight and adds only a negligible increase to the computational effort of pose estimation.