 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep-Geometric 6 DoF Localization from a Single Image in Topo-metric Maps
Feb 04, 2020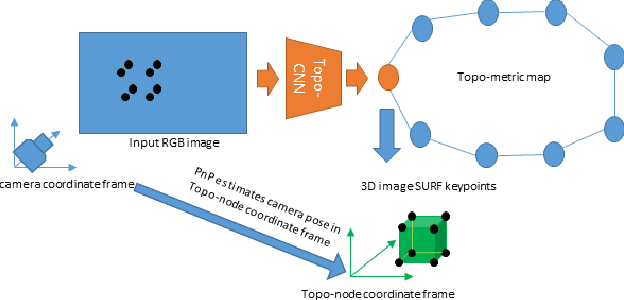
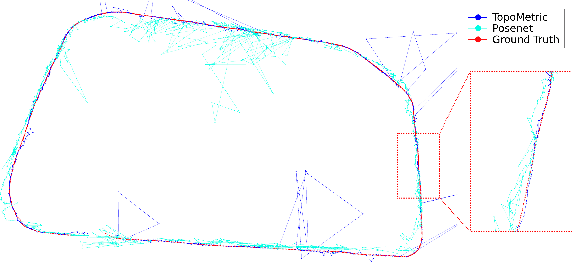
We describe a Deep-Geometric Localizer that is able to estimate the full 6 Degree of Freedom (DoF) global pose of the camera from a single image in a previously mapped environment. Our map is a topo-metric one, with discrete topological nodes whose 6 DoF poses are known. Each topo-node in our map also comprises of a set of points, whose 2D features and 3D locations are stored as part of the mapping process. For the mapping phase, we utilise a stereo camera and a regular stereo visual SLAM pipeline. During the localization phase, we take a single camera image, localize it to a topological node using Deep Learning, and use a geometric algorithm (PnP) on the matched 2D features (and their 3D positions in the topo map) to determine the full 6 DoF globally consistent pose of the camera. Our method divorces the mapping and the localization algorithms and sensors (stereo and mono), and allows accurate 6 DoF pose estimation in a previously mapped environment using a single camera. With potential VR/AR and localization applications in single camera devices such as mobile phones and drones, our hybrid algorithm compares favourably with the fully Deep-Learning based Pose-Net that regresses pose from a single image in simulated as well as real environments.