 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based 3D Occupancy Prediction for Autonomous Navigation in Occluded Environments
Nov 08, 2020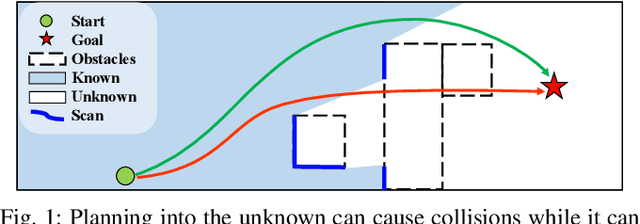
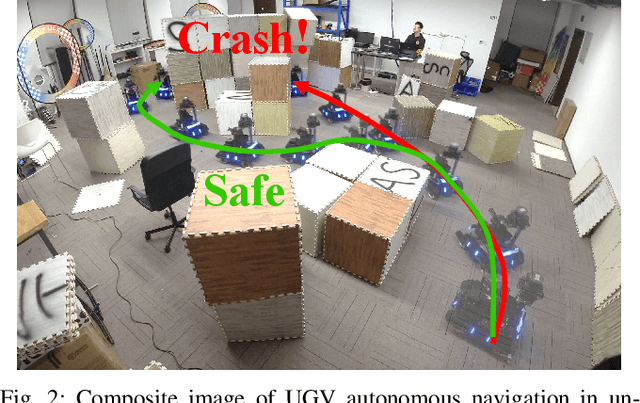

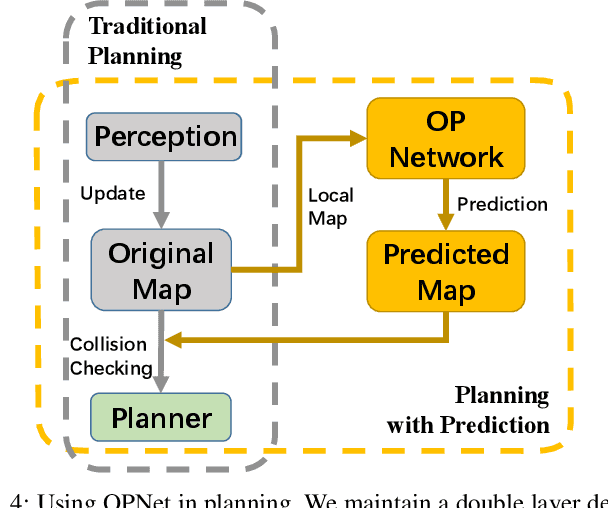
In autonomous navigation of mobile robots, sensors suffer from massive occlusion in cluttered environments, leaving significant amount of space unknown during planning. In practice, treating the unknown space in optimistic or pessimistic ways both set limitations on planning performance, thus aggressiveness and safety cannot be satisfied at the same time. However, humans can infer the exact shape of the obstacles from only partial observation and generate non-conservative trajectories that avoid possible collisions in occluded space. Mimicking human behavior, in this paper, we propose a method based on deep neural network to predict occupancy distribution of unknown space reliably. Specifically, the proposed method utilizes contextual information of environments and learns from prior knowledge to predict obstacle distributions in occluded space. We use unlabeled and no-ground-truth data to train our network and successfully apply it to real-time navigation in unseen environments without any refinement. Results show that our method leverages the performance of a kinodynamic planner by improving security with no reduction of speed in clustered environments.