 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Efficient Deep Learning models for Determining Road Surface Condition from Roadside Camera Images and Weather Data
Sep 22, 2020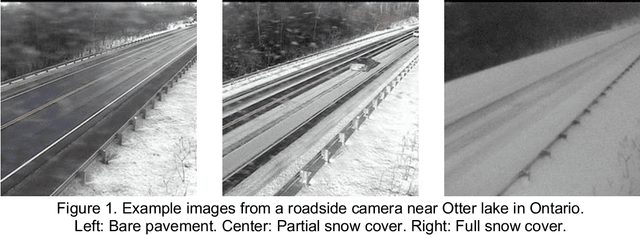
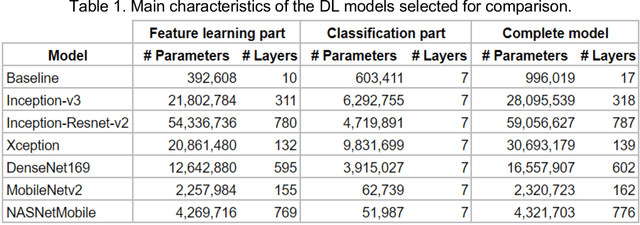
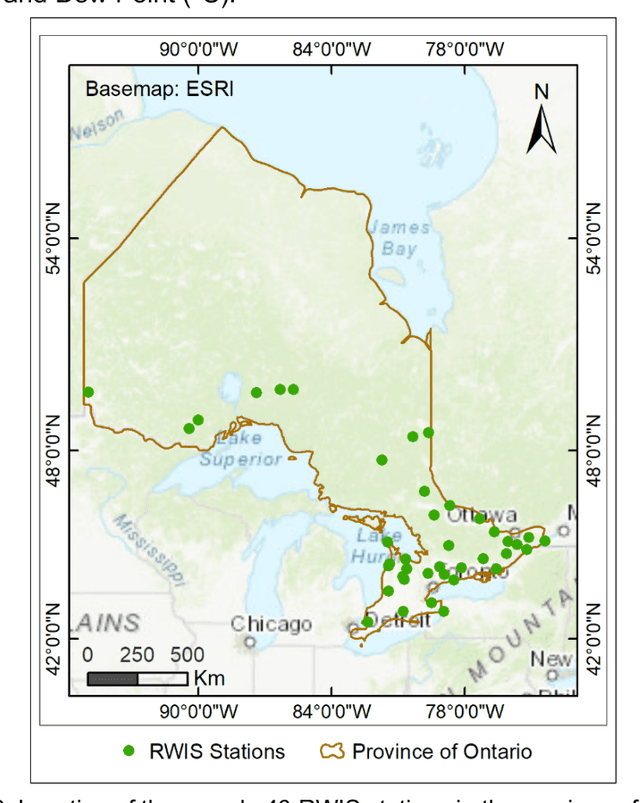
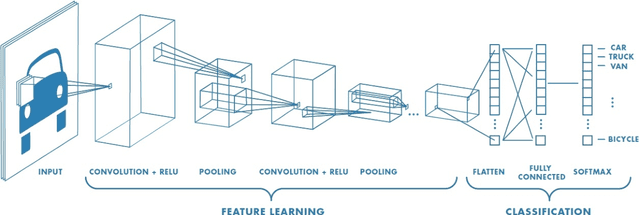
Road maintenance during the Winter season is a safety critical and resource demanding operation. One of its key activities is determining road surface condition (RSC) in order to prioritize roads and allocate cleaning efforts such as plowing or salting. Two conventional approaches for determining RSC are: visual examination of roadside camera images by trained personnel and patrolling the roads to perform on-site inspections. However, with more than 500 cameras collecting images across Ontario, visual examination becomes a resource-intensive activity, difficult to scale especially during periods of snowstorms. This paper presents the results of a study focused on improving the efficiency of road maintenance operations. We use multiple Deep Learning models to automatically determine RSC from roadside camera images and weather variables, extending previous research where similar methods have been used to deal with the problem. The dataset we use was collected during the 2017-2018 Winter season from 40 stations connected to the Ontario Road Weather Information System (RWIS), it includes 14.000 labeled images and 70.000 weather measurements. We train and evaluate the performance of seven state-of-the-art models from the Computer Vision literature, including the recent DenseNet, NASNet, and MobileNet. Moreover, by following systematic ablation experiments we adapt previously published Deep Learning models and reduce their number of parameters to about ~1.3% compared to their original parameter count, and by integrating observations from weather variables the models are able to better ascertain RSC under poor visibility conditions.
* Source code for experiments is available at https://github.com/jmcarrillog/deep-learning-for-road-surface-condition
An Improved Deep Belief Network Model for Road Safety Analyses
Dec 17, 2018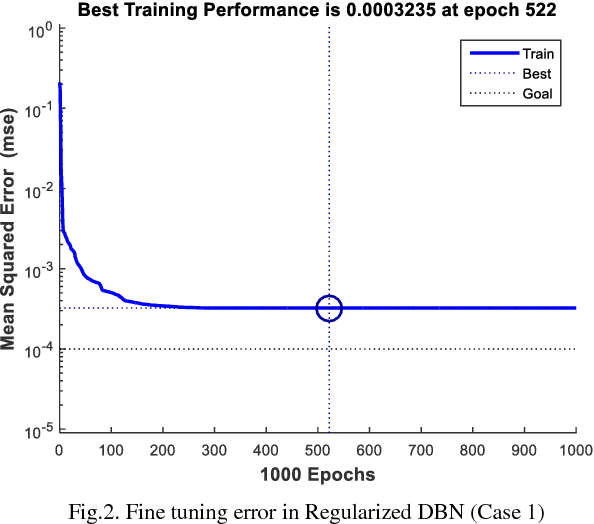


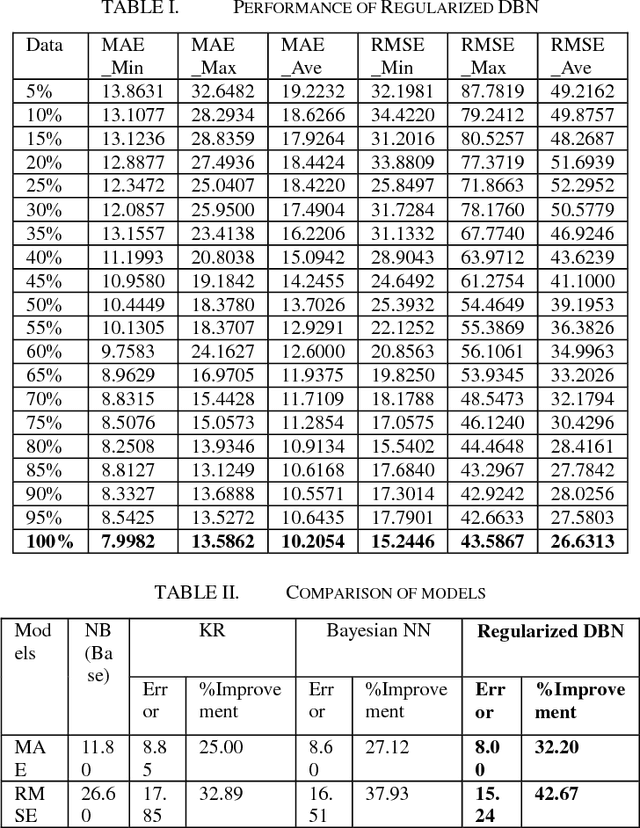
Crash prediction is a critical component of road safety analyses. A widely adopted approach to crash prediction is application of regression based techniques. The underlying calibration process is often time-consuming, requiring significant domain knowledge and expertise and cannot be easily automated. This paper introduces a new machine learning (ML) based approach as an alternative to the traditional techniques. The proposed ML model is called regularized deep belief network, which is a deep neural network with two training steps: it is first trained using an unsupervised learning algorithm and then fine-tuned by initializing a Bayesian neural network with the trained weights from the first step. The resulting model is expected to have improved prediction power and reduced need for the time-consuming human intervention. In this paper, we attempt to demonstrate the potential of this new model for crash prediction through two case studies including a collision data set from 800 km stretch of Highway 401 and other highways in Ontario, Canada. Our intention is to show the performance of this ML approach in comparison to various traditional models including negative binomial (NB) model, kernel regression (KR), and Bayesian neural network (Bayesian NN). We also attempt to address other related issues such as effect of training data size and training parameters.
Winter Road Surface Condition Recognition Using A Pretrained Deep Convolutional Network
Dec 17, 2018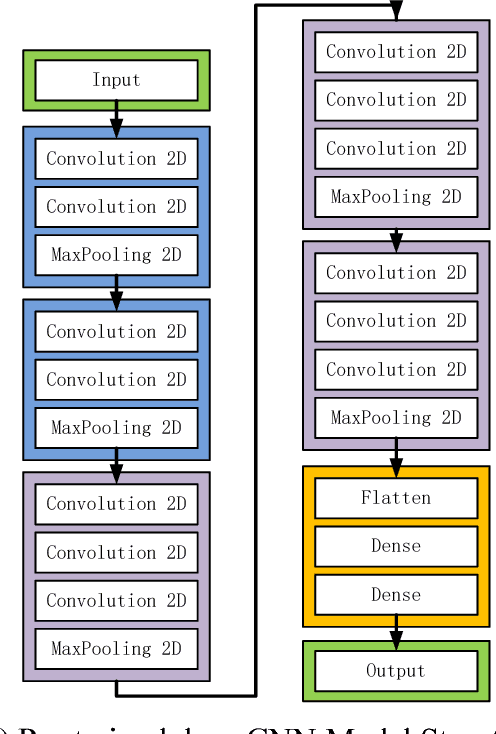
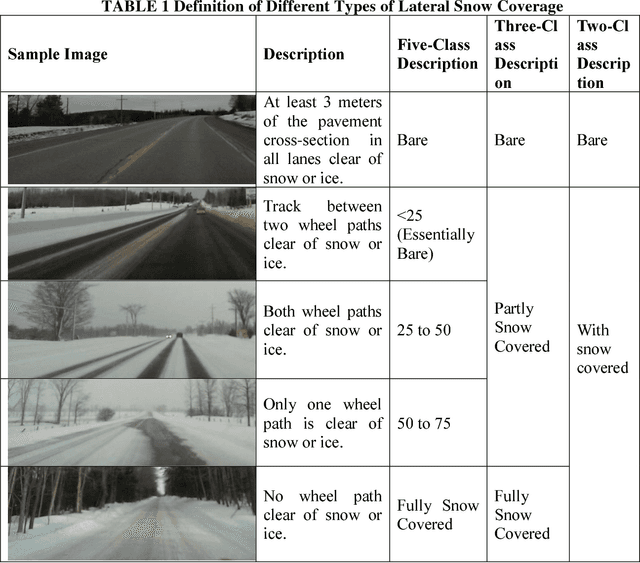
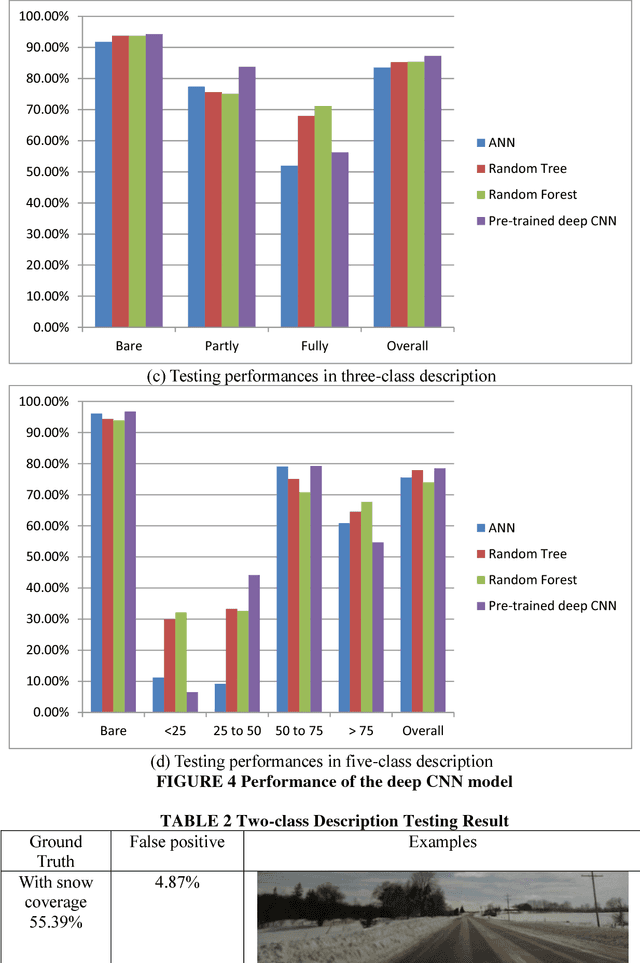
This paper investigates the application of the latest machine learning technique deep neural networks for classifying road surface conditions (RSC) based on images from smartphones. Traditional machine learning techniques such as support vector machine (SVM) and random forests (RF) have been attempted in literature; however, their classification performance has been less than desirable due to challenges associated with image noises caused by sunlight glare and residual salts. A deep learning model based on convolutional neural network (CNN) is proposed and evaluated for its potential to address these challenges for improved classification accuracy. In the proposed approach we introduce the idea of applying an existing CNN model that has been pre-trained using millions of images with proven high recognition accuracy. The model is extended with two additional fully-connected layers of neurons for learning the specific features of the RSC images. The whole model is then trained with a low learning rate for fine-tuning by using a small set of RSC images. Results show that the proposed model has the highest classification performance in comparison to the traditional machine learning techniques. The testing accuracy with different training dataset sizes is also analyzed, showing the potential of achieving much higher accuracy with a larger training dataset.
A Deep Learning Model for Traffic Flow State Classification Based on Smart Phone Sensor Data
Sep 26, 2017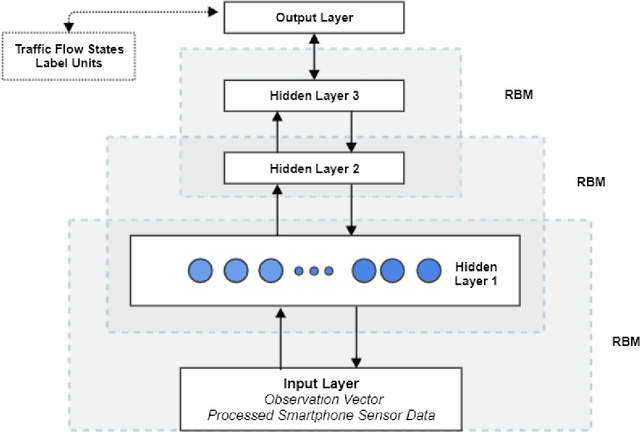
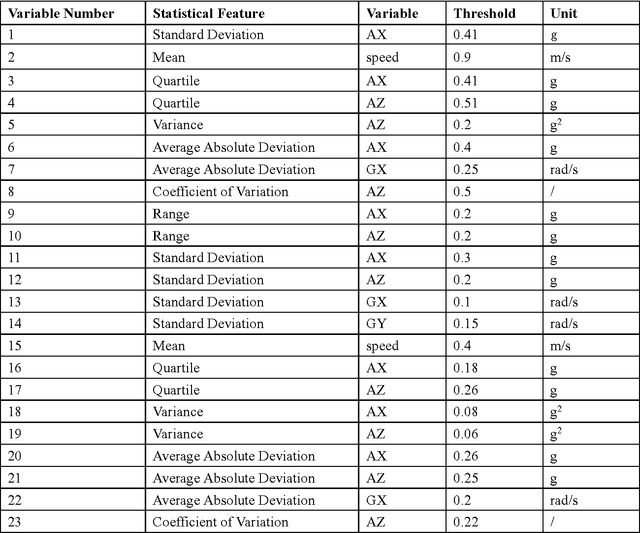
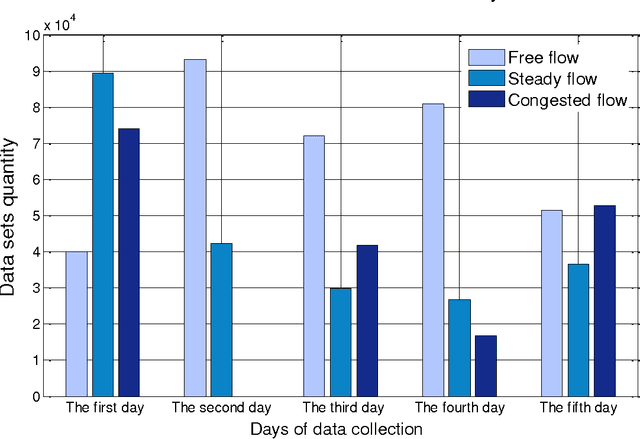
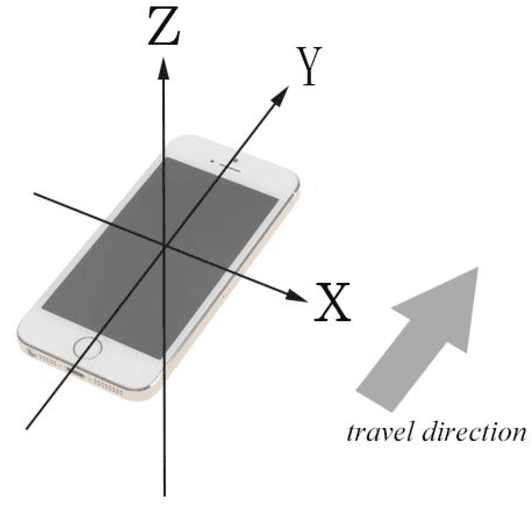
This study proposes a Deep Belief Network model to classify traffic flow states. The model is capable of processing massive, high-density, and noise-contaminated data sets generated from smartphone sensors. The statistical features of Vehicle acceleration, angular acceleration, and GPS speed data, recorded by smartphone software, are analyzed, and then used as input for traffic flow state classification. Data from a five-day experiment is used to train and test the proposed model. A total of 747,856 sets of data are generated and used for both traffic flow states classification and sensitivity analysis of input variables. The result shows that the proposed Deep Belief Network model is superior to traditional machine learning methods in both classification performance and computational efficiency.