 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate Dynamic Programming for Planning a Ride-Sharing System using Autonomous Fleets of Electric Vehicles
Oct 18, 2018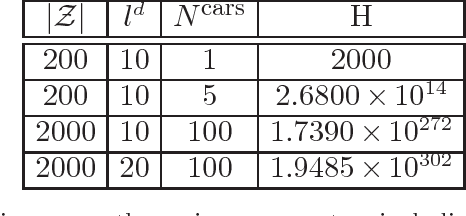
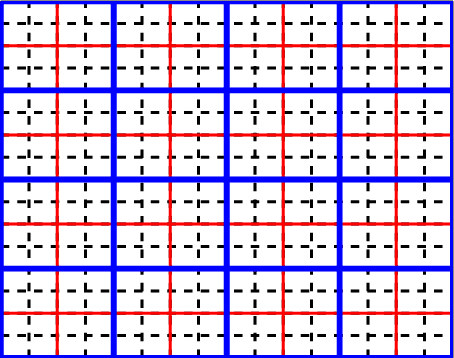
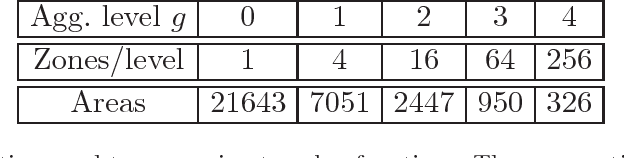
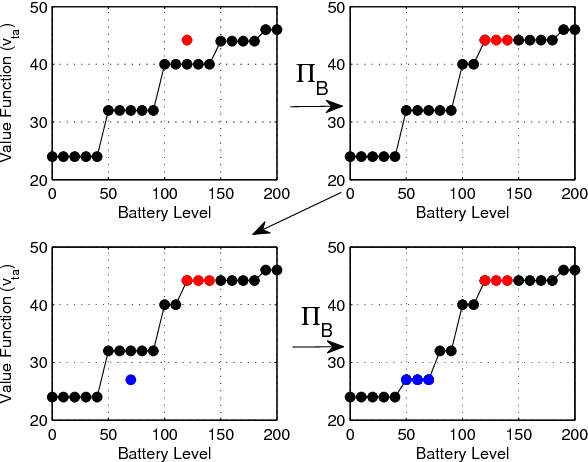
Within a decade, almost every major auto company, along with fleet operators such as Uber, have announced plans to put autonomous vehicles on the road. At the same time, electric vehicles are quickly emerging as a next-generation technology that is cost effective, in addition to offering the benefits of reducing the carbon footprint. The combination of a centrally managed fleet of driverless vehicles, along with the operating characteristics of electric vehicles, is creating a transformative new technology that offers significant cost savings with high service levels. This problem involves a dispatch problem for assigning riders to cars, a planning problem for deciding on the fleet size, and a surge pricing problem for deciding on the price per trip. In this work, we propose to use approximate dynamic programming to develop high-quality operational dispatch strategies to determine which car (given the battery level) is best for a particular trip (considering its length and destination), when a car should be recharged, and when it should be re-positioned to a different zone which offers a higher density of trips. We then discuss surge pricing using an adaptive learning approach to decide on the price for each trip. Finally, we discuss the fleet size problem which depends on the previous two problems.
Monte Carlo Tree Search with Sampled Information Relaxation Dual Bounds
Apr 20, 2017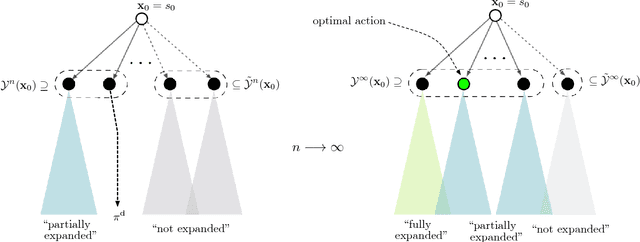
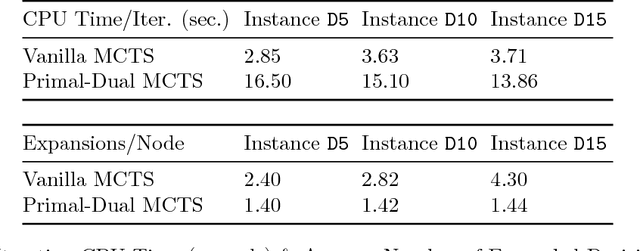
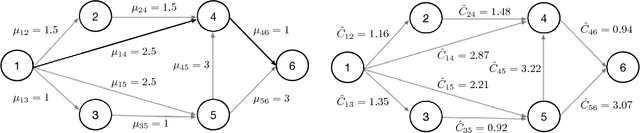
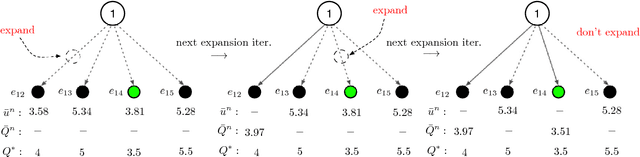
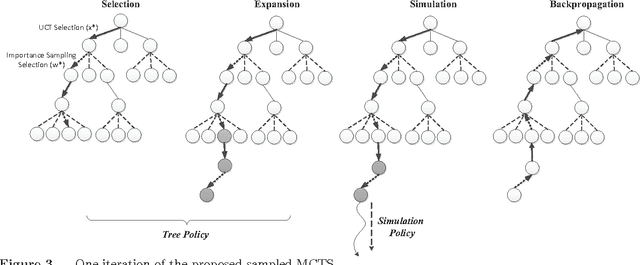
Monte Carlo Tree Search (MCTS), most famously used in game-play artificial intelligence (e.g., the game of Go), is a well-known strategy for constructing approximate solutions to sequential decision problems. Its primary innovation is the use of a heuristic, known as a default policy, to obtain Monte Carlo estimates of downstream values for states in a decision tree. This information is used to iteratively expand the tree towards regions of states and actions that an optimal policy might visit. However, to guarantee convergence to the optimal action, MCTS requires the entire tree to be expanded asymptotically. In this paper, we propose a new technique called Primal-Dual MCTS that utilizes sampled information relaxation upper bounds on potential actions, creating the possibility of "ignoring" parts of the tree that stem from highly suboptimal choices. This allows us to prove that despite converging to a partial decision tree in the limit, the recommended action from Primal-Dual MCTS is optimal. The new approach shows significant promise when used to optimize the behavior of a single driver navigating a graph while operating on a ride-sharing platform. Numerical experiments on a real dataset of 7,000 trips in New Jersey suggest that Primal-Dual MCTS improves upon standard MCTS by producing deeper decision trees and exhibits a reduced sensitivity to the size of the action space.
The Information-Collecting Vehicle Routing Problem: Stochastic Optimization for Emergency Storm Response
May 18, 2016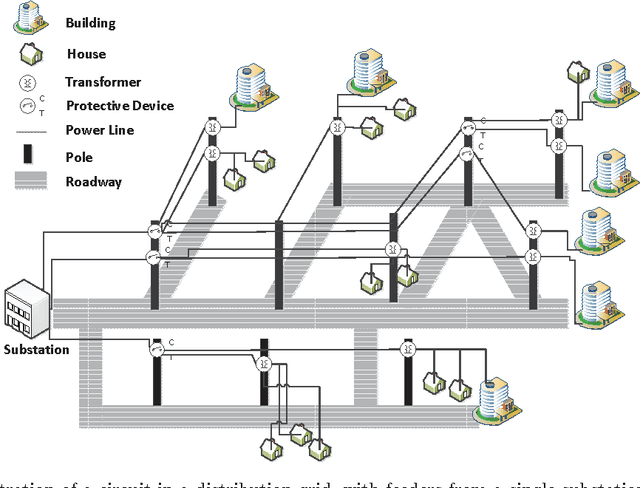

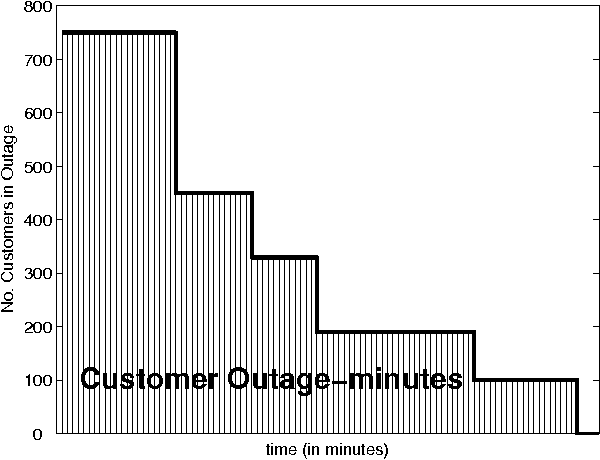
Utilities face the challenge of responding to power outages due to storms and ice damage, but most power grids are not equipped with sensors to pinpoint the precise location of the faults causing the outage. Instead, utilities have to depend primarily on phone calls (trouble calls) from customers who have lost power to guide the dispatching of utility trucks. In this paper, we develop a policy that routes a utility truck to restore outages in the power grid as quickly as possible, using phone calls to create beliefs about outages, but also using utility trucks as a mechanism for collecting additional information. This means that routing decisions change not only the physical state of the truck (as it moves from one location to another) and the grid (as the truck performs repairs), but also our belief about the network, creating the first stochastic vehicle routing problem that explicitly models information collection and belief modeling. We address the problem of managing a single utility truck, which we start by formulating as a sequential stochastic optimization model which captures our belief about the state of the grid. We propose a stochastic lookahead policy, and use Monte Carlo tree search (MCTS) to produce a practical policy that is asymptotically optimal. Simulation results show that the developed policy restores the power grid much faster compared to standard industry heuristics.