 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen SESAME: Fighting Botnets with Seed Reconstructions of Domain Generation Algorithms
Jan 12, 2023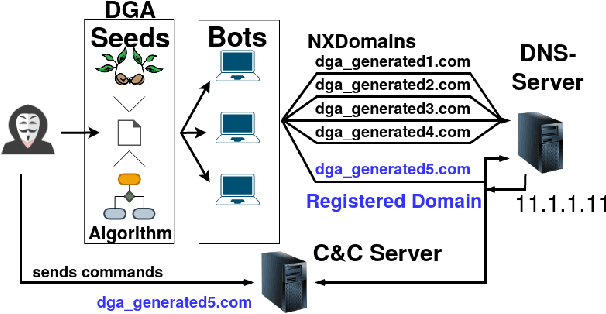

An important aspect of many botnets is their capability to generate pseudorandom domain names using Domain Generation Algorithms (DGAs). A cyber criminal can register such domains to establish periodically changing rendezvous points with the bots. DGAs make use of seeds to generate sets of domains. Seeds can easily be changed in order to generate entirely new groups of domains while using the same underlying algorithm. While this requires very little manual effort for an adversary, security specialists typically have to manually reverse engineer new malware strains to reconstruct the seeds. Only when the seed and DGA are known, past and future domains can be generated, efficiently attributed, blocked, sinkholed or used for a take-down. Common counters in the literature consist of databases or Machine Learning (ML) based detectors to keep track of past and future domains of known DGAs and to identify DGA-generated domain names, respectively. However, database based approaches can not detect domains generated by new DGAs, and ML approaches can not generate future domain names. In this paper, we introduce SESAME, a system that combines the two above-mentioned approaches and contains a module for automatic Seed Reconstruction, which is, to our knowledge, the first of its kind. It is used to automatically classify domain names, rate their novelty, and determine the seeds of the underlying DGAs. SESAME consists of multiple DGA-specific Seed Reconstructors and is designed to work purely based on domain names, as they are easily obtainable from observing the network traffic. We evaluated our approach on 20.8 gigabytes of DNS-lookups. Thereby, we identified 17 DGAs, of which 4 were entirely new to us.
Learning Personalized Human-Aware Robot Navigation Using Virtual Reality Demonstrations from a User Study
Mar 28, 2022



For the most comfortable, human-aware robot navigation, subjective user preferences need to be taken into account. This paper presents a novel reinforcement learning framework to train a personalized navigation controller along with an intuitive virtual reality demonstration interface. The conducted user study provides evidence that our personalized approach significantly outperforms classical approaches with more comfortable human-robot experiences. We achieve these results using only a few demonstration trajectories from non-expert users, who predominantly appreciate the intuitive demonstration setup. As we show in the experiments, the learned controller generalizes well to states not covered in the demonstration data, while still reflecting user preferences during navigation. Finally, we transfer the navigation controller without loss in performance to a real robot.