 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvolutional Feature Enhancement and Attention Fusion BiFPN for Ship Detection in SAR Images
Jun 18, 2025Synthetic Aperture Radar (SAR) enables submeter-resolution imaging and all-weather monitoring via active microwave and advanced signal processing. Currently, SAR has found extensive applications in critical maritime domains such as ship detection. However, SAR ship detection faces several challenges, including significant scale variations among ships, the presence of small offshore vessels mixed with noise, and complex backgrounds for large nearshore ships. To address these issues, this paper proposes a novel feature enhancement and fusion framework named C-AFBiFPN. C-AFBiFPN constructs a Convolutional Feature Enhancement (CFE) module following the backbone network, aiming to enrich feature representation and enhance the ability to capture and represent local details and contextual information. Furthermore, C-AFBiFPN innovatively integrates BiFormer attention within the fusion strategy of BiFPN, creating the AFBiFPN network. AFBiFPN improves the global modeling capability of cross-scale feature fusion and can adaptively focus on critical feature regions. The experimental results on SAR Ship Detection Dataset (SSDD) indicate that the proposed approach substantially enhances detection accuracy for small targets, robustness against occlusions, and adaptability to multi-scale features.
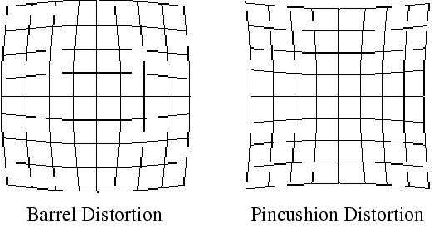
Blind Detection and Compensation of Camera Lens Geometric Distortions
May 25, 2004
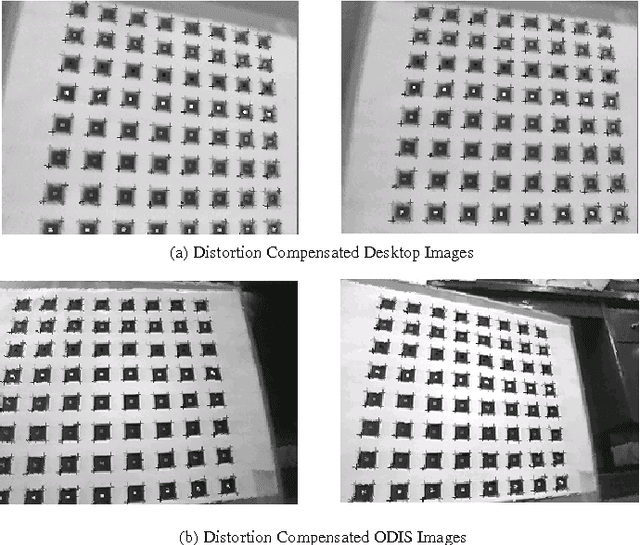
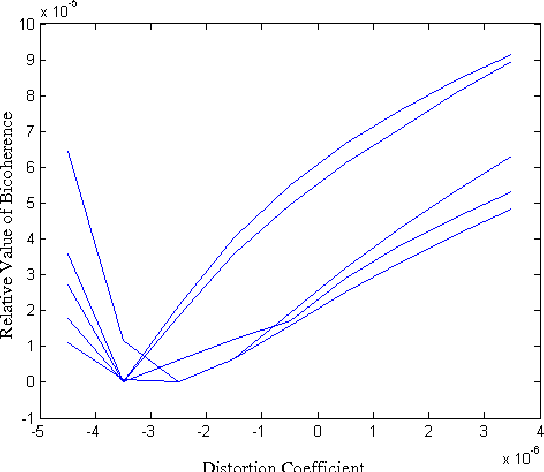
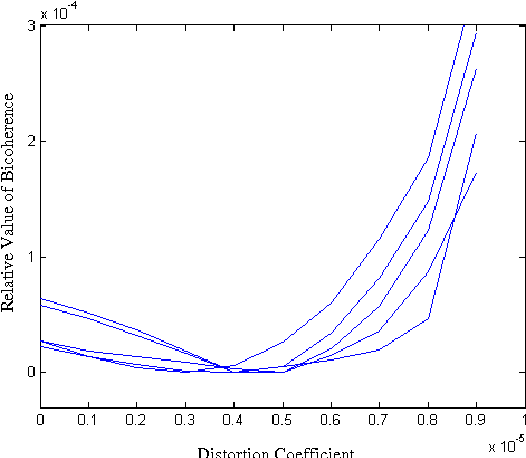
This paper presents a blind detection and compensation technique for camera lens geometric distortions. The lens distortion introduces higher-order correlations in the frequency domain and in turn it can be detected using higher-order spectral analysis tools without assuming any specific calibration target. The existing blind lens distortion removal method only considered a single-coefficient radial distortion model. In this paper, two coefficients are considered to model approximately the geometric distortion. All the models considered have analytical closed-form inverse formulae.
* 6 pages, 4 figures, 2 tables
A Family of Simplified Geometric Distortion Models for Camera Calibration
Aug 02, 2003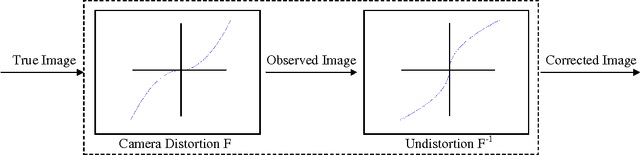
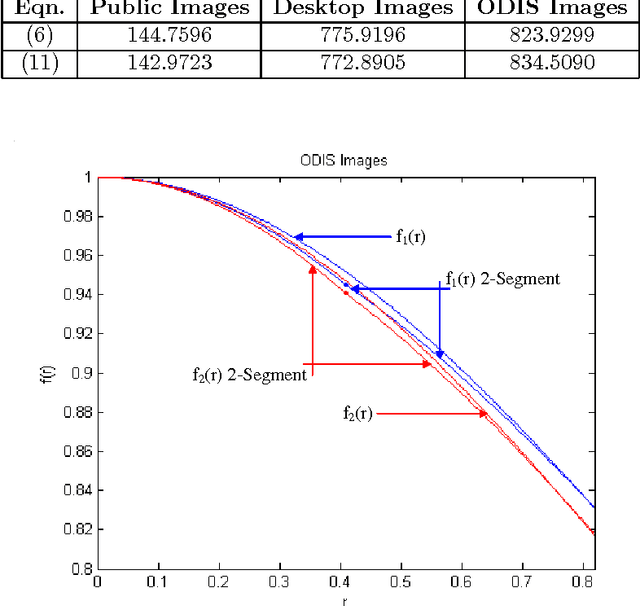
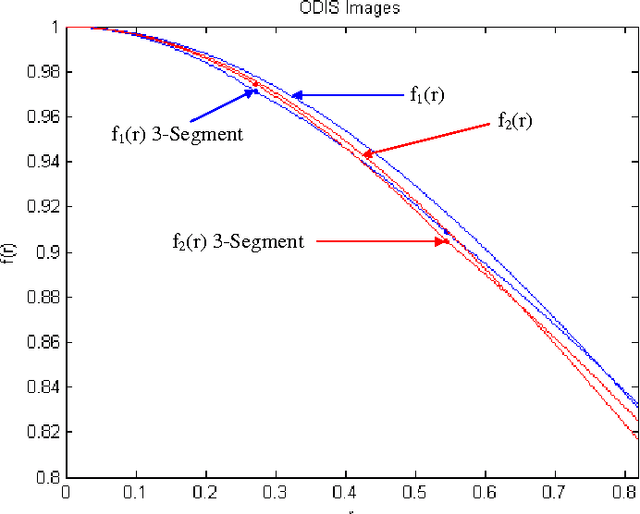

The commonly used radial distortion model for camera calibration is in fact an assumption or a restriction. In practice, camera distortion could happen in a general geometrical manner that is not limited to the radial sense. This paper proposes a simplified geometrical distortion modeling method by using two different radial distortion functions in the two image axes. A family of simplified geometric distortion models is proposed, which are either simple polynomials or the rational functions of polynomials. Analytical geometric undistortion is possible using two of the distortion functions discussed in this paper and their performance can be improved by applying a piecewise fitting idea. Our experimental results show that the geometrical distortion models always perform better than their radial distortion counterparts. Furthermore, the proposed geometric modeling method is more appropriate for cameras whose distortion is not perfectly radially symmetric around the center of distortion.
Camera Calibration: a USU Implementation
Jul 31, 2003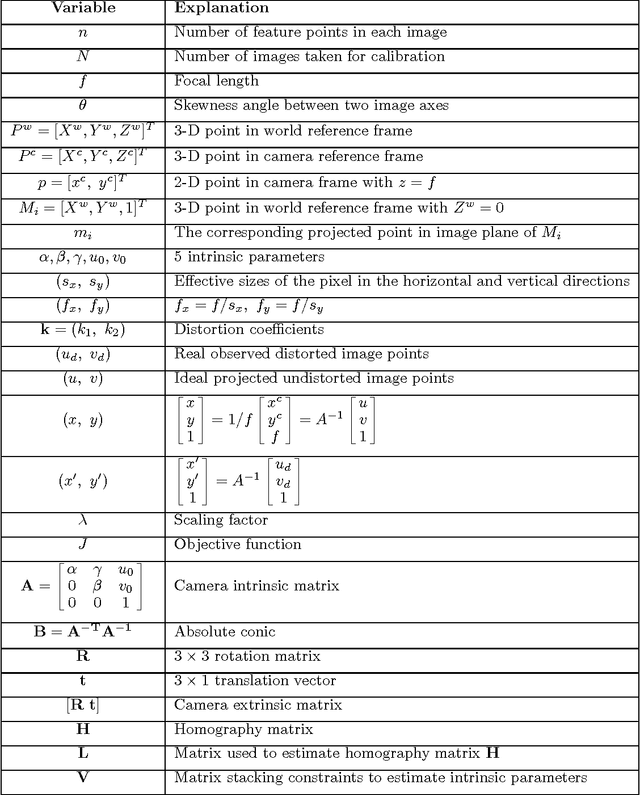
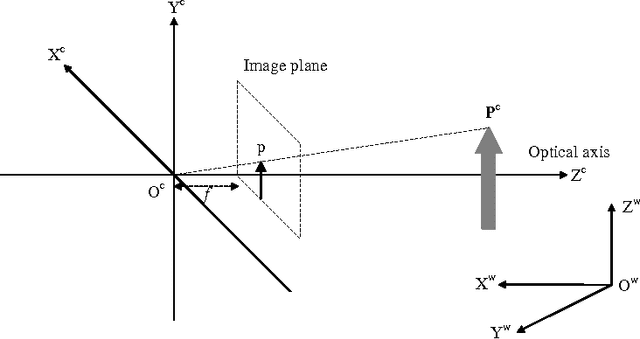

The task of camera calibration is to estimate the intrinsic and extrinsic parameters of a camera model. Though there are some restricted techniques to infer the 3-D information about the scene from uncalibrated cameras, effective camera calibration procedures will open up the possibility of using a wide range of existing algorithms for 3-D reconstruction and recognition. The applications of camera calibration include vision-based metrology, robust visual platooning and visual docking of mobile robots where the depth information is important.
An Analytical Piecewise Radial Distortion Model for Precision Camera Calibration
Jul 21, 2003


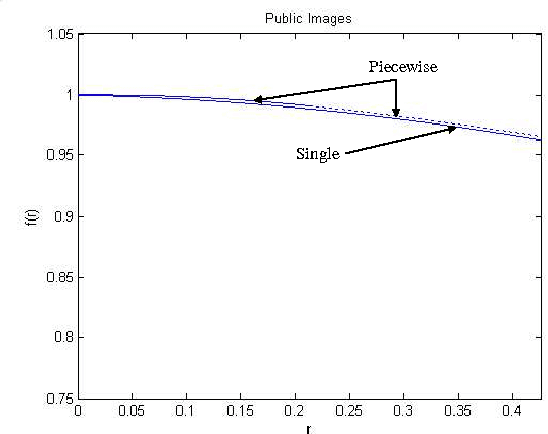
The common approach to radial distortion is by the means of polynomial approximation, which introduces distortion-specific parameters into the camera model and requires estimation of these distortion parameters. The task of estimating radial distortion is to find a radial distortion model that allows easy undistortion as well as satisfactory accuracy. This paper presents a new piecewise radial distortion model with easy analytical undistortion formula. The motivation for seeking a piecewise radial distortion model is that, when a camera is resulted in a low quality during manufacturing, the nonlinear radial distortion can be complex. Using low order polynomials to approximate the radial distortion might not be precise enough. On the other hand, higher order polynomials suffer from the inverse problem. With the new piecewise radial distortion function, more flexibility is obtained and the radial undistortion can be performed analytically. Experimental results are presented to show that with this new piecewise radial distortion model, better performance is achieved than that using the single function. Furthermore, a comparable performance with the conventional polynomial model using 2 coefficients can also be accomplished.
Rational Radial Distortion Models with Analytical Undistortion Formulae
Jul 20, 2003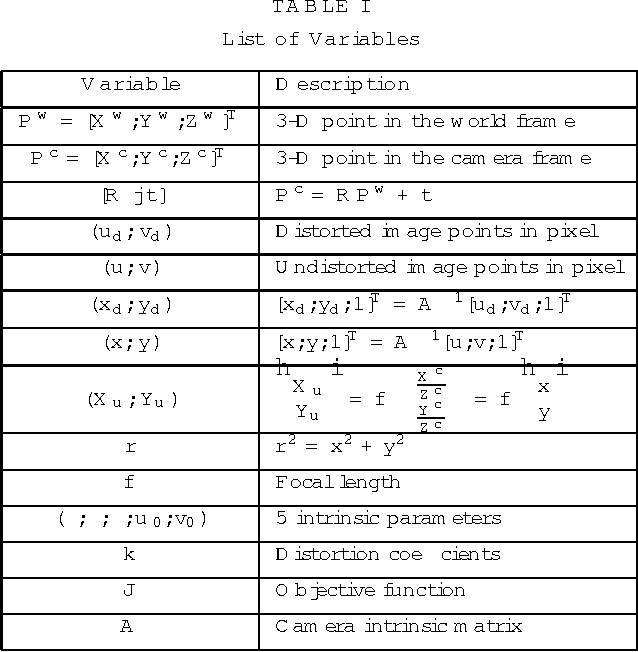


The common approach to radial distortion is by the means of polynomial approximation, which introduces distortion-specific parameters into the camera model and requires estimation of these distortion parameters. The task of estimating radial distortion is to find a radial distortion model that allows easy undistortion as well as satisfactory accuracy. This paper presents a new class of rational radial distortion models with easy analytical undistortion formulae. Experimental results are presented to show that with this class of rational radial distortion models, satisfactory and comparable accuracy is achieved.
A New Analytical Radial Distortion Model for Camera Calibration
Jul 20, 2003



Common approach to radial distortion is by the means of polynomial approximation, which introduces distortion-specific parameters into the camera model and requires estimation of these distortion parameters. The task of estimating radial distortion is to find a radial distortion model that allows easy undistortion as well as satisfactory accuracy. This paper presents a new radial distortion model with an easy analytical undistortion formula, which also belongs to the polynomial approximation category. Experimental results are presented to show that with this radial distortion model, satisfactory accuracy is achieved.
Flexible Camera Calibration Using a New Analytical Radial Undistortion Formula with Application to Mobile Robot Localization
Jul 20, 2003



Most algorithms in 3D computer vision rely on the pinhole camera model because of its simplicity, whereas virtually all imaging devices introduce certain amount of nonlinear distortion, where the radial distortion is the most severe part. Common approach to radial distortion is by the means of polynomial approximation, which introduces distortion-specific parameters into the camera model and requires estimation of these distortion parameters. The task of estimating radial distortion is to find a radial distortion model that allows easy undistortion as well as satisfactory accuracy. This paper presents a new radial distortion model with an easy analytical undistortion formula, which also belongs to the polynomial approximation category. Experimental results are presented to show that with this radial distortion model, satisfactory accuracy is achieved. An application of the new radial distortion model is non-iterative yellow line alignment with a calibrated camera on ODIS, a robot built in our CSOIS.