Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera Calibration: a USU Implementation
Paper and Code
Jul 31, 2003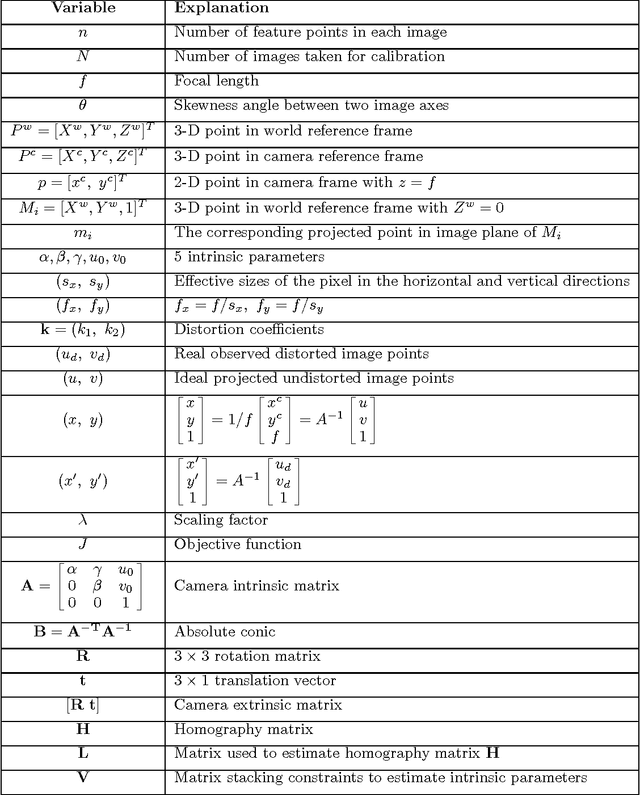
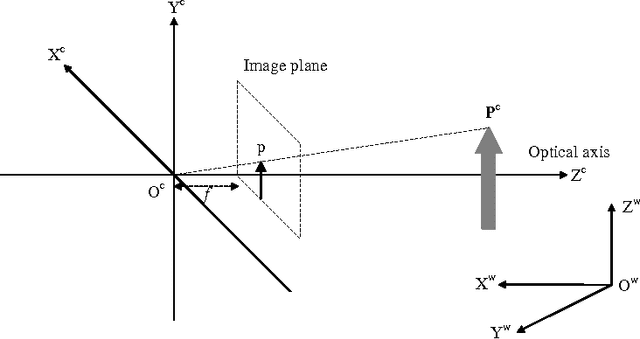

The task of camera calibration is to estimate the intrinsic and extrinsic parameters of a camera model. Though there are some restricted techniques to infer the 3-D information about the scene from uncalibrated cameras, effective camera calibration procedures will open up the possibility of using a wide range of existing algorithms for 3-D reconstruction and recognition. The applications of camera calibration include vision-based metrology, robust visual platooning and visual docking of mobile robots where the depth information is important.
* 39 pages, 19 eps figures, source codes are in the codes.m and
corners.dat
View paper on