 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Electric Vehicle Charging Station Locations: A Data-driven System with Multi-source Fusion
Apr 18, 2025



With the growing electric vehicles (EVs) charging demand, urban planners face the challenges of providing charging infrastructure at optimal locations. For example, range anxiety during long-distance travel and the inadequate distribution of residential charging stations are the major issues many cities face. To achieve reasonable estimation and deployment of the charging demand, we develop a data-driven system based on existing EV trips in New South Wales (NSW) state, Australia, incorporating multiple factors that enhance the geographical feasibility of recommended charging stations. Our system integrates data sources including EV trip data, geographical data such as route data and Local Government Area (LGA) boundaries, as well as features like fire and flood risks, and Points of Interest (POIs). We visualize our results to intuitively demonstrate the findings from our data-driven, multi-source fusion system, and evaluate them through case studies. The outcome of this work can provide a platform for discussion to develop new insights that could be used to give guidance on where to position future EV charging stations.
T-JEPA: A Joint-Embedding Predictive Architecture for Trajectory Similarity Computation
Jun 13, 2024Trajectory similarity computation is an essential technique for analyzing moving patterns of spatial data across various applications such as traffic management, wildlife tracking, and location-based services. Modern methods often apply deep learning techniques to approximate heuristic metrics but struggle to learn more robust and generalized representations from the vast amounts of unlabeled trajectory data. Recent approaches focus on self-supervised learning methods such as contrastive learning, which have made significant advancements in trajectory representation learning. However, contrastive learning-based methods heavily depend on manually pre-defined data augmentation schemes, limiting the diversity of generated trajectories and resulting in learning from such variations in 2D Euclidean space, which prevents capturing high-level semantic variations. To address these limitations, we propose T-JEPA, a self-supervised trajectory similarity computation method employing Joint-Embedding Predictive Architecture (JEPA) to enhance trajectory representation learning. T-JEPA samples and predicts trajectory information in representation space, enabling the model to infer the missing components of trajectories at high-level semantics without relying on domain knowledge or manual effort. Extensive experiments conducted on three urban trajectory datasets and two Foursquare datasets demonstrate the effectiveness of T-JEPA in trajectory similarity computation.
Graph-based Spatial Transformer with Memory Replay for Multi-future Pedestrian Trajectory Prediction
Jun 12, 2022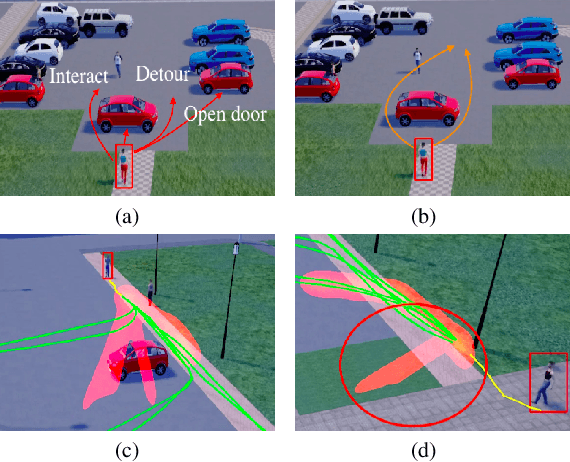


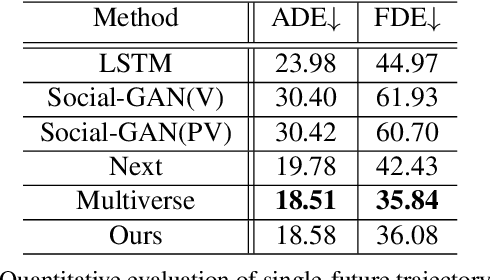
Pedestrian trajectory prediction is an essential and challenging task for a variety of real-life applications such as autonomous driving and robotic motion planning. Besides generating a single future path, predicting multiple plausible future paths is becoming popular in some recent work on trajectory prediction. However, existing methods typically emphasize spatial interactions between pedestrians and surrounding areas but ignore the smoothness and temporal consistency of predictions. Our model aims to forecast multiple paths based on a historical trajectory by modeling multi-scale graph-based spatial transformers combined with a trajectory smoothing algorithm named ``Memory Replay'' utilizing a memory graph. Our method can comprehensively exploit the spatial information as well as correct the temporally inconsistent trajectories (e.g., sharp turns). We also propose a new evaluation metric named ``Percentage of Trajectory Usage'' to evaluate the comprehensiveness of diverse multi-future predictions. Our extensive experiments show that the proposed model achieves state-of-the-art performance on multi-future prediction and competitive results for single-future prediction. Code released at https://github.com/Jacobieee/ST-MR.