 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Manipulation: Semi-supervised Visual Representation and Classroom-to-real Reinforcement Learning for Assembly in Semi-structured Environments
Jun 01, 2024Assembling a slave object into a fixture-free master object represents a critical challenge in flexible manufacturing. Existing deep reinforcement learning-based methods, while benefiting from visual or operational priors, often struggle with small-batch precise assembly tasks due to their reliance on insufficient priors and high-costed model development. To address these limitations, this paper introduces a cognitive manipulation and learning approach that utilizes skill graphs to integrate learning-based object detection with fine manipulation models into a cohesive modular policy. This approach enables the detection of the master object from both global and local perspectives to accommodate positional uncertainties and variable backgrounds, and parametric residual policy to handle pose error and intricate contact dynamics effectively. Leveraging the skill graph, our method supports knowledge-informed learning of semi-supervised learning for object detection and classroom-to-real reinforcement learning for fine manipulation. Simulation experiments on a gear-assembly task have demonstrated that the skill-graph-enabled coarse-operation planning and visual attention are essential for efficient learning and robust manipulation, showing substantial improvements of 13$\%$ in success rate and 15.4$\%$ in number of completion steps over competing methods. Real-world experiments further validate that our system is highly effective for robotic assembly in semi-structured environments.
Transformer-based Spatial-Temporal Feature Learning for EEG Decoding
Jun 11, 2021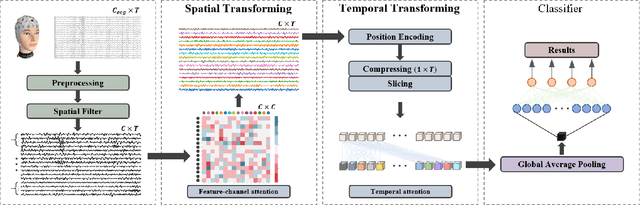
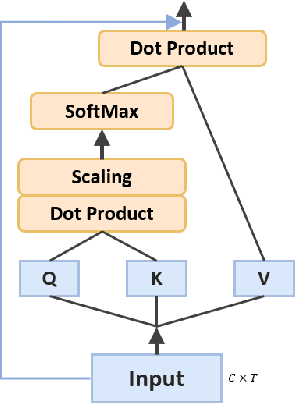
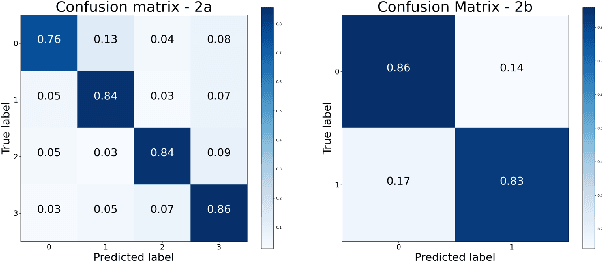
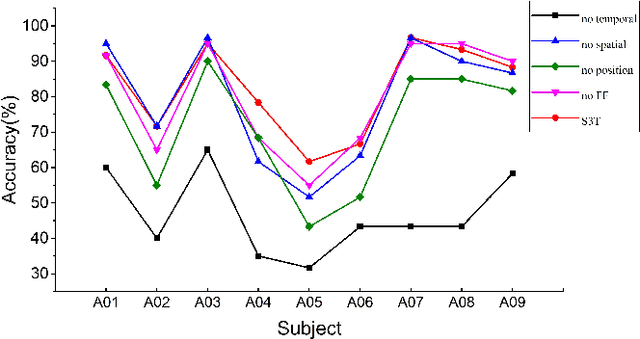
At present, people usually use some methods based on convolutional neural networks (CNNs) for Electroencephalograph (EEG) decoding. However, CNNs have limitations in perceiving global dependencies, which is not adequate for common EEG paradigms with a strong overall relationship. Regarding this issue, we propose a novel EEG decoding method that mainly relies on the attention mechanism. The EEG data is firstly preprocessed and spatially filtered. And then, we apply attention transforming on the feature-channel dimension so that the model can enhance more relevant spatial features. The most crucial step is to slice the data in the time dimension for attention transforming, and finally obtain a highly distinguishable representation. At this time, global averaging pooling and a simple fully-connected layer are used to classify different categories of EEG data. Experiments on two public datasets indicate that the strategy of attention transforming effectively utilizes spatial and temporal features. And we have reached the level of the state-of-the-art in multi-classification of EEG, with fewer parameters. As far as we know, it is the first time that a detailed and complete method based on the transformer idea has been proposed in this field. It has good potential to promote the practicality of brain-computer interface (BCI). The source code can be found at: \textit{https://github.com/anranknight/EEG-Transformer}.
Common Spatial Generative Adversarial Networks based EEG Data Augmentation for Cross-Subject Brain-Computer Interface
Feb 08, 2021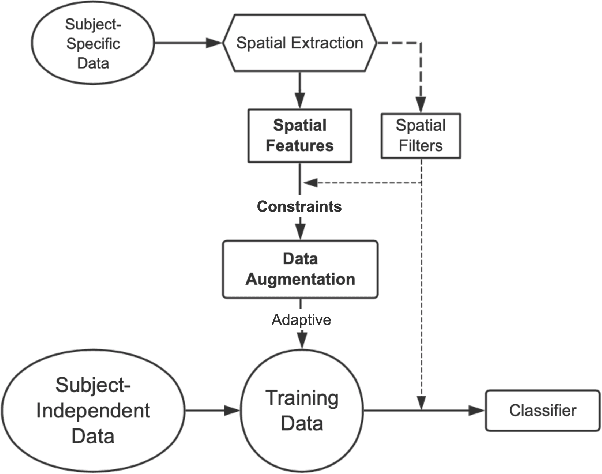
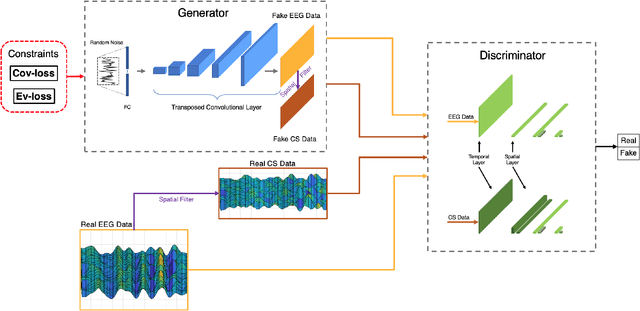
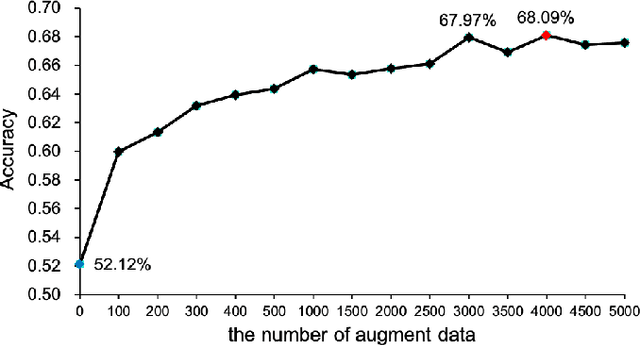
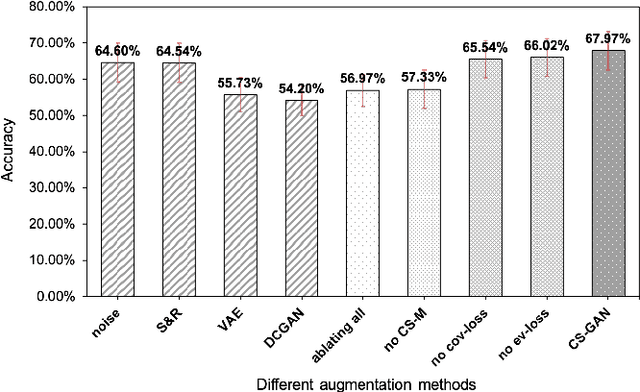
The cross-subject application of EEG-based brain-computer interface (BCI) has always been limited by large individual difference and complex characteristics that are difficult to perceive. Therefore, it takes a long time to collect the training data of each user for calibration. Even transfer learning method pre-training with amounts of subject-independent data cannot decode different EEG signal categories without enough subject-specific data. Hence, we proposed a cross-subject EEG classification framework with a generative adversarial networks (GANs) based method named common spatial GAN (CS-GAN), which used adversarial training between a generator and a discriminator to obtain high-quality data for augmentation. A particular module in the discriminator was employed to maintain the spatial features of the EEG signals and increase the difference between different categories, with two losses for further enhancement. Through adaptive training with sufficient augmentation data, our cross-subject classification accuracy yielded a significant improvement of 15.85% than leave-one subject-out (LOO) test and 8.57% than just adapting 100 original samples on the dataset 2a of BCI competition IV. Moreover, We designed a convolutional neural networks (CNNs) based classification method as a benchmark with a similar spatial enhancement idea, which achieved remarkable results to classify motor imagery EEG data. In summary, our framework provides a promising way to deal with the cross-subject problem and promote the practical application of BCI.