 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Oriented 6-DoF Grasp Pose Detection in Clutters
Feb 24, 2025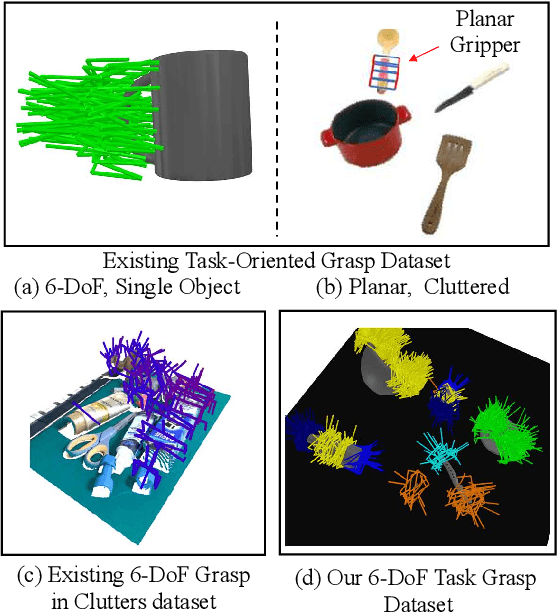

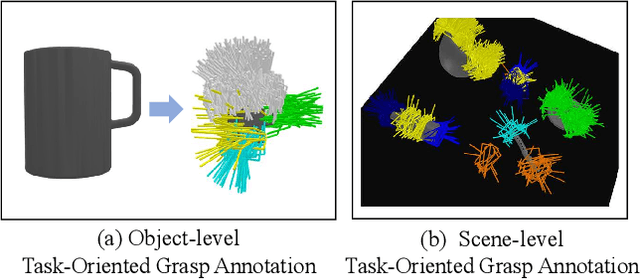

In general, humans would grasp an object differently for different tasks, e.g., "grasping the handle of a knife to cut" vs. "grasping the blade to hand over". In the field of robotic grasp pose detection research, some existing works consider this task-oriented grasping and made some progress, but they are generally constrained by low-DoF gripper type or non-cluttered setting, which is not applicable for human assistance in real life. With an aim to get more general and practical grasp models, in this paper, we investigate the problem named Task-Oriented 6-DoF Grasp Pose Detection in Clutters (TO6DGC), which extends the task-oriented problem to a more general 6-DOF Grasp Pose Detection in Cluttered (multi-object) scenario. To this end, we construct a large-scale 6-DoF task-oriented grasping dataset, 6-DoF Task Grasp (6DTG), which features 4391 cluttered scenes with over 2 million 6-DoF grasp poses. Each grasp is annotated with a specific task, involving 6 tasks and 198 objects in total. Moreover, we propose One-Stage TaskGrasp (OSTG), a strong baseline to address the TO6DGC problem. Our OSTG adopts a task-oriented point selection strategy to detect where to grasp, and a task-oriented grasp generation module to decide how to grasp given a specific task. To evaluate the effectiveness of OSTG, extensive experiments are conducted on 6DTG. The results show that our method outperforms various baselines on multiple metrics. Real robot experiments also verify that our OSTG has a better perception of the task-oriented grasp points and 6-DoF grasp poses.