 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Object-Centric Models for Planning with Monte Carlo Tree Search
Jun 12, 2026We introduce COMET (Causal Object-centric Model for Efficient Tree search), a model-based reinforcement learning algorithm that performs Monte Carlo Tree Search in a slot-structured latent space. COMET pairs a frozen unsupervised object-centric encoder with a transformer-based world model, in which actions are bound to objects through a novel action-slot fusion mechanism that is used in slot transition prediction. Policy and value heads use object-causal attention, modulating token interactions by learned per-slot relevance scores so that decision-making concentrates on task-relevant entities. COMET adds an explicit object-level inductive bias to MuZero-style latent planning. Across eight visually and dynamically diverse tasks from the Object-Centric Visual RL benchmark, ManiSkill, Robosuite, and VizDoom, COMET achieves a higher mean normalized score during the early stages of training compared to object-centric and monolithic baselines.
Revisiting Tree Search for LLMs: Gumbel and Sequential Halving for Budget-Scalable Reasoning
Mar 22, 2026Neural tree search is a powerful decision-making algorithm widely used in complex domains such as game playing and model-based reinforcement learning. Recent work has applied AlphaZero-style tree search to enhance the reasoning capabilities of Large Language Models (LLMs) during inference, but we find that this approach suffers from a scaling failure: on GSM8K and Game24, accuracy drops as the search budget increases. In this paper, we present ReSCALE, an adaptation of Gumbel AlphaZero MCTS that replaces Dirichlet noise and PUCT selection with Gumbel sampling and Sequential Halving, restoring monotonic scaling without changes to the model or its training. ReSCALE reaches 58.4\% on GSM8K and 85.3\% on Game24 at budgets where the baseline degrades. Ablations confirm that Sequential Halving is the primary driver of the improvement.
Object-Centric World Models Meet Monte Carlo Tree Search
Jan 10, 2026In this paper, we introduce ObjectZero, a novel reinforcement learning (RL) algorithm that leverages the power of object-level representations to model dynamic environments more effectively. Unlike traditional approaches that process the world as a single undifferentiated input, our method employs Graph Neural Networks (GNNs) to capture intricate interactions among multiple objects. These objects, which can be manipulated and interact with each other, serve as the foundation for our model's understanding of the environment. We trained the algorithm in a complex setting teeming with diverse, interactive objects, demonstrating its ability to effectively learn and predict object dynamics. Our results highlight that a structured world model operating on object-centric representations can be successfully integrated into a model-based RL algorithm utilizing Monte Carlo Tree Search as a planning module.
Gradual Optimization Learning for Conformational Energy Minimization
Nov 05, 2023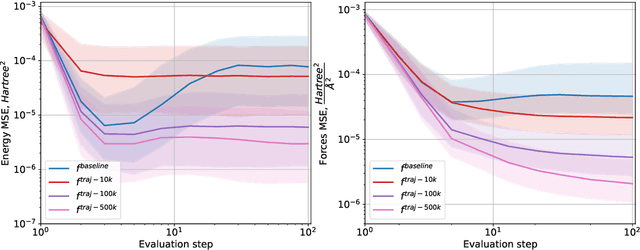

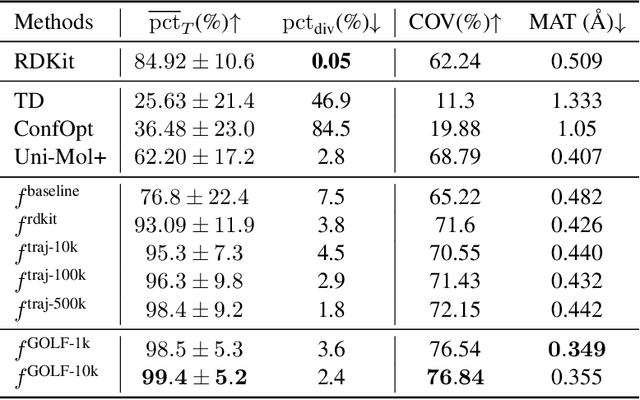
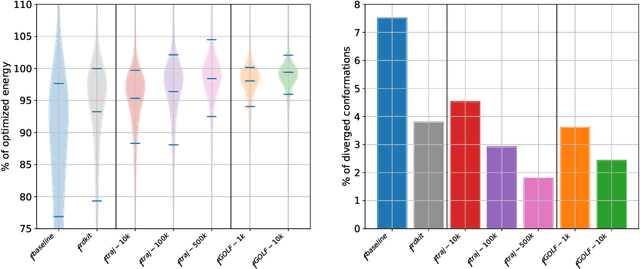
Molecular conformation optimization is crucial to computer-aided drug discovery and materials design. Traditional energy minimization techniques rely on iterative optimization methods that use molecular forces calculated by a physical simulator (oracle) as anti-gradients. However, this is a computationally expensive approach that requires many interactions with a physical simulator. One way to accelerate this procedure is to replace the physical simulator with a neural network. Despite recent progress in neural networks for molecular conformation energy prediction, such models are prone to distribution shift, leading to inaccurate energy minimization. We find that the quality of energy minimization with neural networks can be improved by providing optimization trajectories as additional training data. Still, it takes around $5 \times 10^5$ additional conformations to match the physical simulator's optimization quality. In this work, we present the Gradual Optimization Learning Framework (GOLF) for energy minimization with neural networks that significantly reduces the required additional data. The framework consists of an efficient data-collecting scheme and an external optimizer. The external optimizer utilizes gradients from the energy prediction model to generate optimization trajectories, and the data-collecting scheme selects additional training data to be processed by the physical simulator. Our results demonstrate that the neural network trained with GOLF performs on par with the oracle on a benchmark of diverse drug-like molecules using $50$x less additional data.
Graphical Object-Centric Actor-Critic
Oct 26, 2023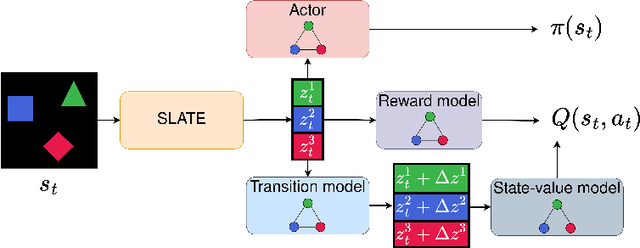
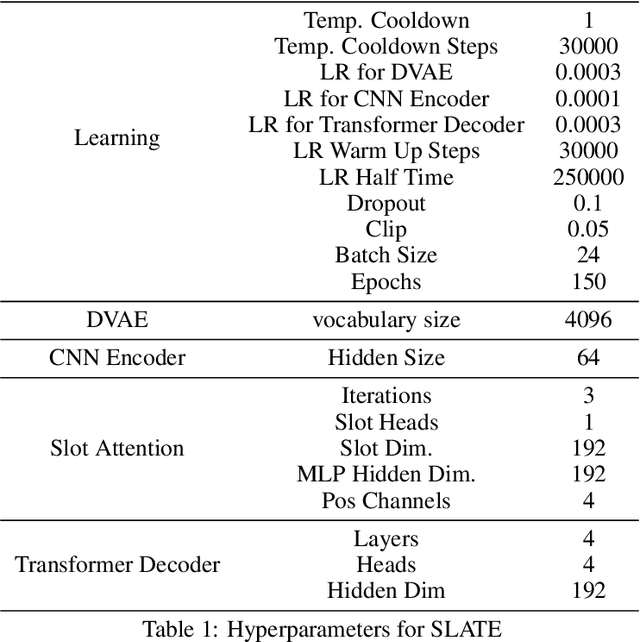
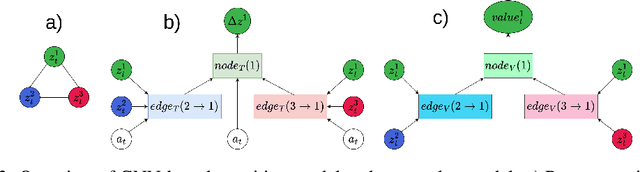
There have recently been significant advances in the problem of unsupervised object-centric representation learning and its application to downstream tasks. The latest works support the argument that employing disentangled object representations in image-based object-centric reinforcement learning tasks facilitates policy learning. We propose a novel object-centric reinforcement learning algorithm combining actor-critic and model-based approaches to utilize these representations effectively. In our approach, we use a transformer encoder to extract object representations and graph neural networks to approximate the dynamics of an environment. The proposed method fills a research gap in developing efficient object-centric world models for reinforcement learning settings that can be used for environments with discrete or continuous action spaces. Our algorithm performs better in a visually complex 3D robotic environment and a 2D environment with compositional structure than the state-of-the-art model-free actor-critic algorithm built upon transformer architecture and the state-of-the-art monolithic model-based algorithm.
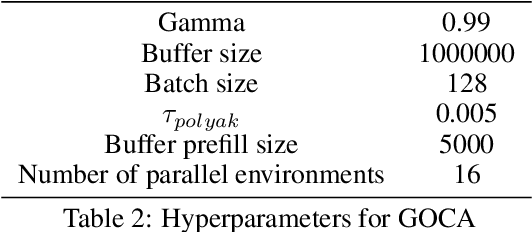
Long-Term Exploration in Persistent MDPs
Sep 21, 2021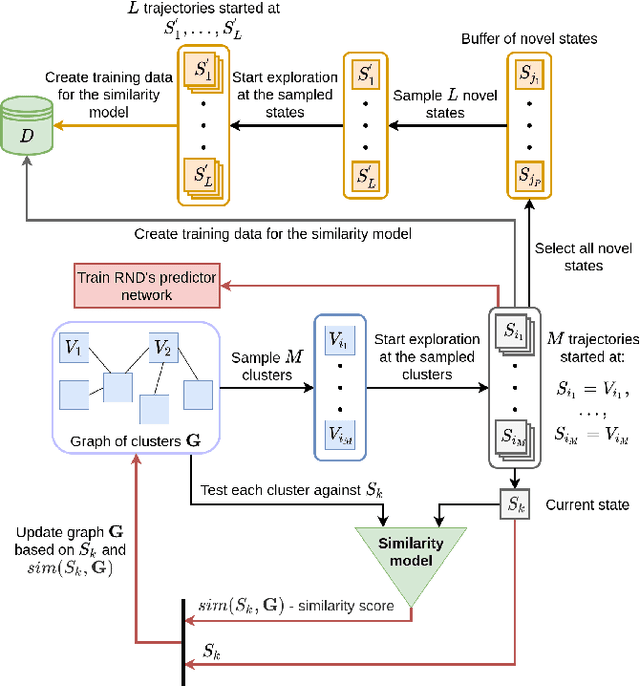
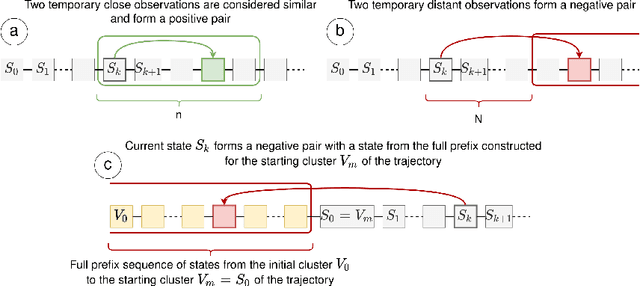
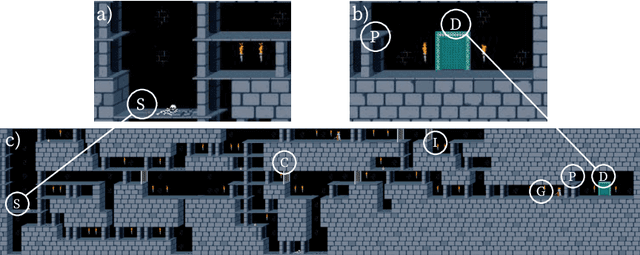
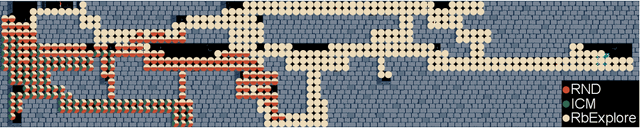
Exploration is an essential part of reinforcement learning, which restricts the quality of learned policy. Hard-exploration environments are defined by huge state space and sparse rewards. In such conditions, an exhaustive exploration of the environment is often impossible, and the successful training of an agent requires a lot of interaction steps. In this paper, we propose an exploration method called Rollback-Explore (RbExplore), which utilizes the concept of the persistent Markov decision process, in which agents during training can roll back to visited states. We test our algorithm in the hard-exploration Prince of Persia game, without rewards and domain knowledge. At all used levels of the game, our agent outperforms or shows comparable results with state-of-the-art curiosity methods with knowledge-based intrinsic motivation: ICM and RND. An implementation of RbExplore can be found at https://github.com/cds-mipt/RbExplore.