 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of Ground Reaction Forces from Kinematic Data during Locomotion
Feb 03, 2026Ground reaction forces (GRFs) provide fundamental insight into human gait mechanics and are widely used to assess joint loading, limb symmetry, balance control, and motor function. Despite their clinical relevance, the use of GRF remains underutilised in clinical workflows due to the practical limitations of force plate systems. In this work, we present a force-plate-free approach for estimating GRFs using only marker-based motion capture data. This kinematics only method to estimate and decompose GRF makes it well suited for widespread clinical depolyment. By using kinematics from sixteen body segments, we estimate the centre of mass (CoM) and compute GRFs, which are subsequently decomposed into individual components through a minimization-based approach. Through this framework, we can identify gait stance phases and provide access to clinically meaningful kinetic measures without a dedicated force plate system. Experimental results demonstrate the viability of CoM and GRF estimation based solely on kinematic data, supporting force-plate-free gait analysis.
Design of a Breakaway Utensil Attachment for Enhanced Safety in Robot-Assisted Feeding
Feb 25, 2025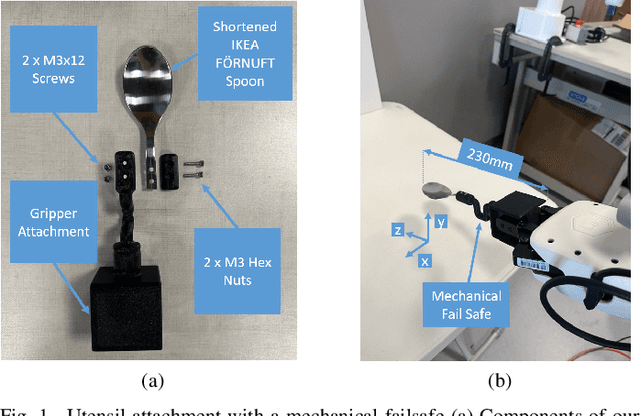
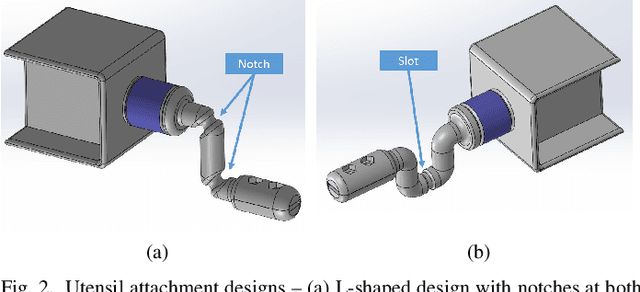
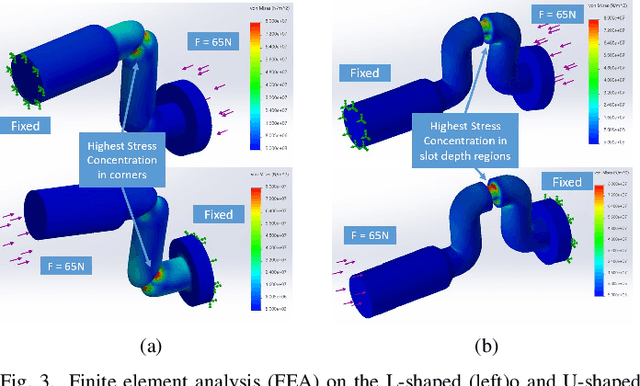
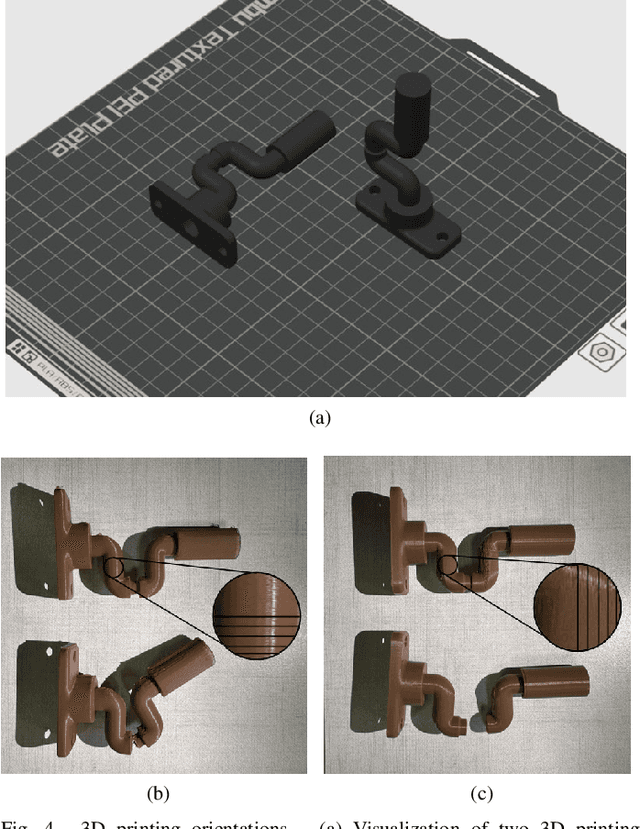
Robot-assisted feeding systems enhance the independence of individuals with motor impairments and alleviate caregiver burden. While existing systems predominantly rely on software-based safety features to mitigate risks during unforeseen collisions, this study explores the use of a mechanical fail-safe to improve safety. We designed a breakaway utensil attachment that decouples forces exerted by the robot on the user when excessive forces occur. Finite element analysis (FEA) simulations were performed to predict failure points under various loading conditions, followed by experimental validation using 3D-printed attachments with variations in slot depth and wall loops. To facilitate testing, a drop test rig was developed and validated. Our results demonstrated a consistent failure point at the slot of the attachment, with a slot depth of 1 mm and three wall loops achieving failure at the target force of 65 N. Additionally, the parameters can be tailored to customize the breakaway force based on user-specific factors, such as comfort and pain tolerance. CAD files and utensil assembly instructions can be found here: https://tinyurl.com/rfa-utensil-attachment