 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Body Schema Learning from Full-body Extero/Proprioception Sensors
Feb 28, 2024



For a robot, its body structure is an a-prior knowledge when it is designed. However, when such information is not available, can a robot recognize it by itself? In this paper, we aim to grant a robot such ability to learn its body structure from exteroception and proprioception data collected from on-body sensors. By a novel machine learning method, the robot can learn a binary Heterogeneous Dependency Matrix from its sensor readings. We showed such matrix is equivalent to a Heterogeneous out-tree structure which can uniquely represent the robot body topology. We explored the properties of such matrix and the out-tree, and proposed a remedy to fix them when they are contaminated by partial observability or data noise. We ran our algorithm on 6 different robots with different body structures in simulation and 1 real robot. Our algorithm correctly recognized their body structures with only on-body sensor readings but no topology prior knowledge.
Snake Robot with Tactile Perception Navigates on Large-scale Challenging Terrain
Dec 06, 2023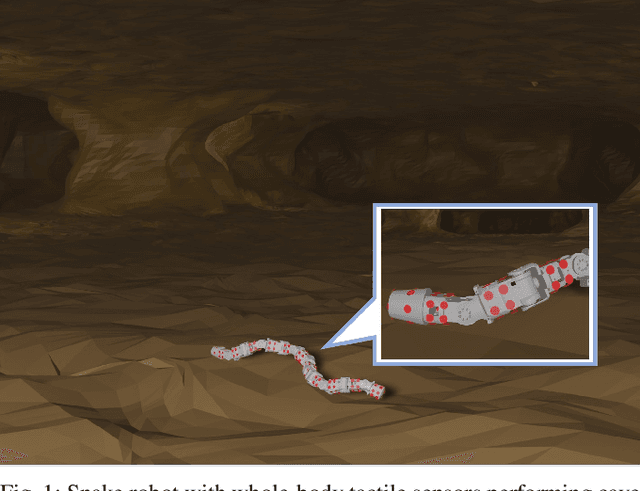
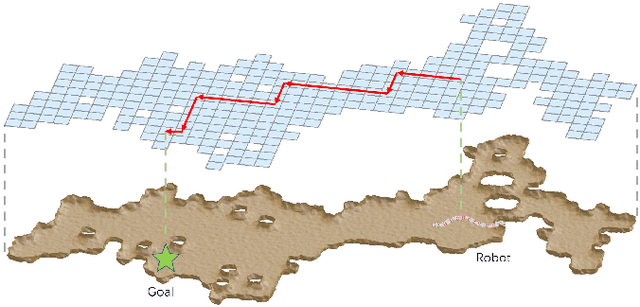
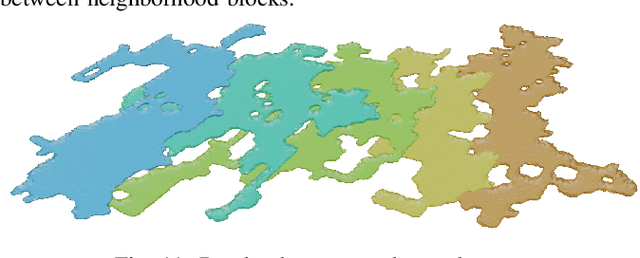
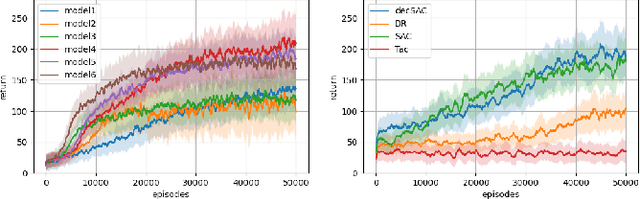
Along with the advancement of robot skin technology, there has been notable progress in the development of snake robots featuring body-surface tactile perception. In this study, we proposed a locomotion control framework for snake robots that integrates tactile perception to augment their adaptability to various terrains. Our approach embraces a hierarchical reinforcement learning (HRL) architecture, wherein the high-level orchestrates global navigation strategies while the low-level uses curriculum learning for local navigation maneuvers. Due to the significant computational demands of collision detection in whole-body tactile sensing, the efficiency of the simulator is severely compromised. Thus a distributed training pattern to mitigate the efficiency reduction was adopted. We evaluated the navigation performance of the snake robot in complex large-scale cave exploration with challenging terrains to exhibit improvements in motion efficiency, evidencing the efficacy of tactile perception in terrain-adaptive locomotion of snake robots.
Hierarchical RL-Guided Large-scale Navigation of a Snake Robot
Dec 06, 2023



Classical snake robot control leverages mimicking snake-like gaits tuned for specific environments. However, to operate adaptively in unstructured environments, gait generation must be dynamically scheduled. In this work, we present a four-layer hierarchical control scheme to enable the snake robot to navigate freely in large-scale environments. The proposed model decomposes navigation into global planning, local planning, gait generation, and gait tracking. Using reinforcement learning (RL) and a central pattern generator (CPG), our method learns to navigate in complex mazes within hours and can be directly deployed to arbitrary new environments in a zero-shot fashion. We use the high-fidelity model of Northeastern's slithering robot COBRA to test the effectiveness of the proposed hierarchical control approach.