 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSnake Robot with Tactile Perception Navigates on Large-scale Challenging Terrain
Paper and Code
Dec 06, 2023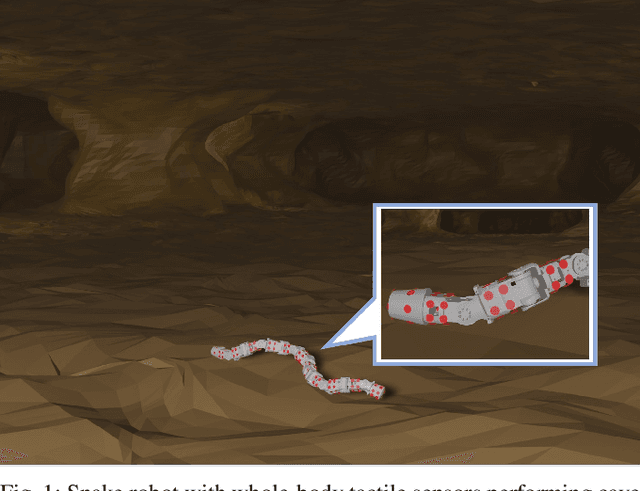
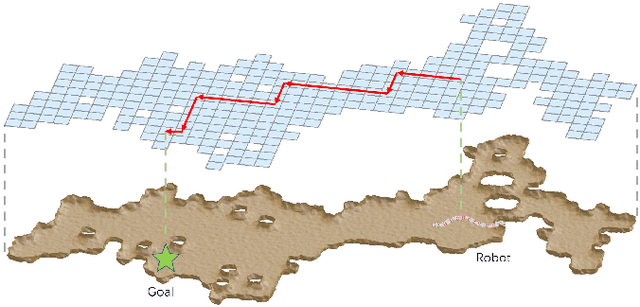
Along with the advancement of robot skin technology, there has been notable progress in the development of snake robots featuring body-surface tactile perception. In this study, we proposed a locomotion control framework for snake robots that integrates tactile perception to augment their adaptability to various terrains. Our approach embraces a hierarchical reinforcement learning (HRL) architecture, wherein the high-level orchestrates global navigation strategies while the low-level uses curriculum learning for local navigation maneuvers. Due to the significant computational demands of collision detection in whole-body tactile sensing, the efficiency of the simulator is severely compromised. Thus a distributed training pattern to mitigate the efficiency reduction was adopted. We evaluated the navigation performance of the snake robot in complex large-scale cave exploration with challenging terrains to exhibit improvements in motion efficiency, evidencing the efficacy of tactile perception in terrain-adaptive locomotion of snake robots.