 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Agonist-Antagonist Coupling in the Absence of Mechanical Coupling after Targeted Muscle Reinnervation
Jan 23, 2026Following limb amputation and targeted muscle reinnervation (TMR), nerves supplying agonist and antagonist muscles are rerouted into separate targeted muscles, disrupting natural neuromechanical coupling between muscle groups. Using high-density intramuscular microelectrode arrays in reinnervated muscles, we show that neural signals for agonist and antagonist tasks remain functionally coupled: motor units active during agonist tasks were also recruited during corresponding antagonist tasks, despite no visual feedback on coactivation being provided.
Separation of Neural Drives to Muscles from Transferred Polyfunctional Nerves using Implanted Micro-electrode Arrays
Oct 14, 2024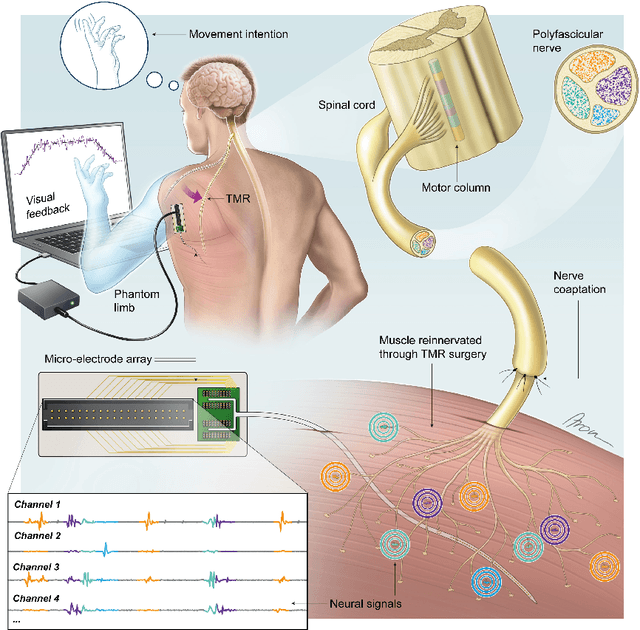
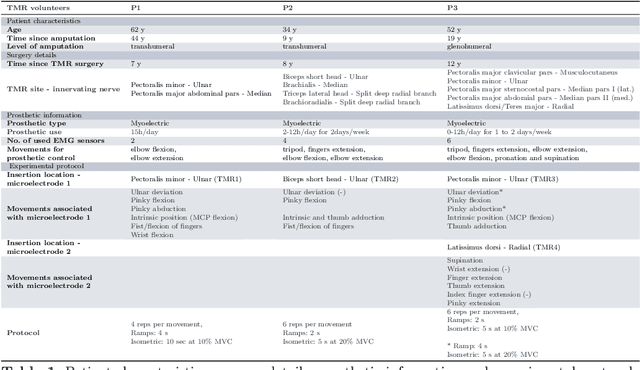
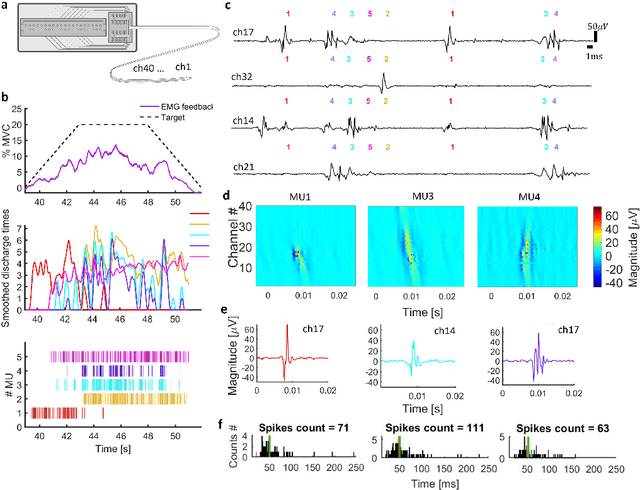

Following limb amputation, neural signals for limb functions persist in the residual peripheral nerves. Targeted muscle reinnervation (TMR) allows to redirected these signals into spare muscles to recover the neural information through electromyography (EMG). However, a significant challenge arises in separating distinct neural commands redirected from the transferred nerves to the muscles. Disentangling overlapping signals from EMG recordings remains complex, as they can contain mixed neural information that complicates limb function interpretation. To address this challenge, Regenerative Peripheral Nerve Interfaces (RPNIs) surgically partition the nerve into individual fascicles that reinnervate specific muscle grafts, isolating distinct neural sources for more precise control and interpretation of EMG signals. We introduce a novel biointerface that combines TMR surgery of polyvalent nerves with a high-density micro-electrode array implanted at a single site within a reinnervated muscle. Instead of surgically identifying distinct nerve fascicles, our approach separates all neural signals that are re-directed into a single muscle, using the high spatio-temporal selectivity of the micro-electrode array and mathematical source separation methods. We recorded EMG signals from four reinnervated muscles while volunteers performed phantom limb tasks. The decomposition of these signals into motor unit activity revealed distinct clusters of motor neurons associated with diverse functional tasks. Notably, our method enabled the extraction of multiple neural commands within a single reinnervated muscle, eliminating the need for surgical nerve division. This approach not only has the potential of enhancing prosthesis control but also uncovers mechanisms of motor neuron synergies following TMR, providing valuable insights into how the central nervous system encodes movement after reinnervation.
Toward a Framework for Adaptive ImpedancenControl of an Upper-limb Prosthesis
Sep 11, 2022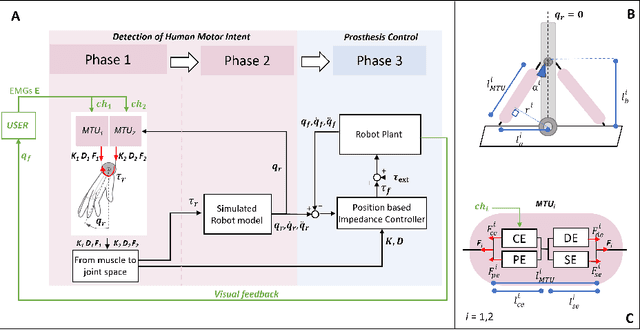
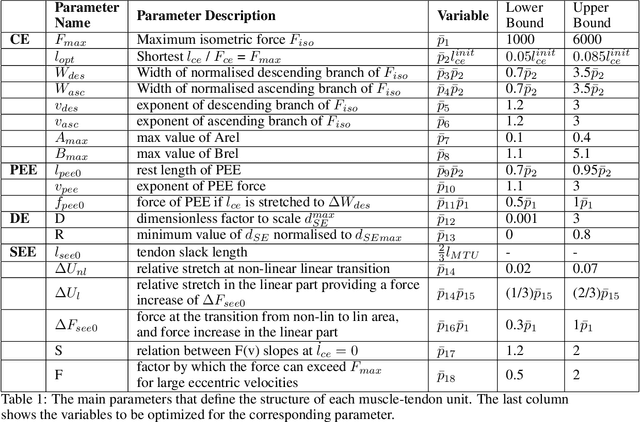
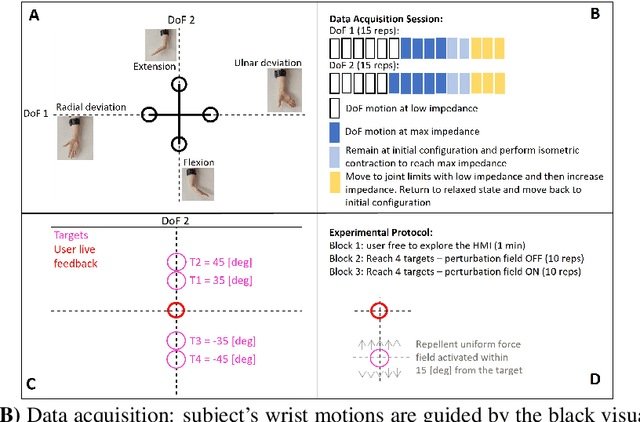
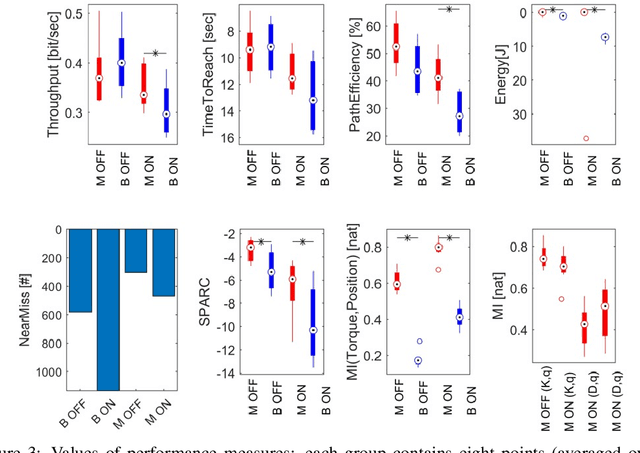
This paper describes a novel framework for a human-machine interface that can be used to control an upper-limb prosthesis. The objective is to estimate the human's motor intent from noisy surface electromyography signals and to execute the motor intent on the prosthesis (i.e., the robot) even in the presence of previously unseen perturbations. The framework includes muscle-tendon models for each degree of freedom, a method for learning the parameter values of models used to estimate the user's motor intent, and a variable impedance controller that uses the stiffness and damping values obtained from the muscle models to adapt the prosthesis' motion trajectory and dynamics. We experimentally evaluate our framework in the context of able-bodied humans using a simulated version of the human-machine interface to perform reaching tasks that primarily actuate one degree of freedom in the wrist, and consider external perturbations in the form of a uniform force field that pushes the wrist away from the target. We demonstrate that our framework provides the desired adaptive performance, and substantially improves performance in comparison with a data-driven baseline.