 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCartographer_glass: 2D Graph SLAM Framework using LiDAR for Glass Environments
Dec 16, 2022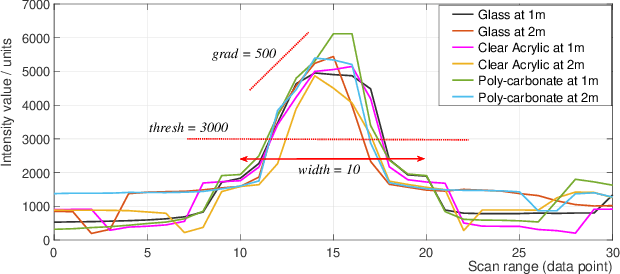
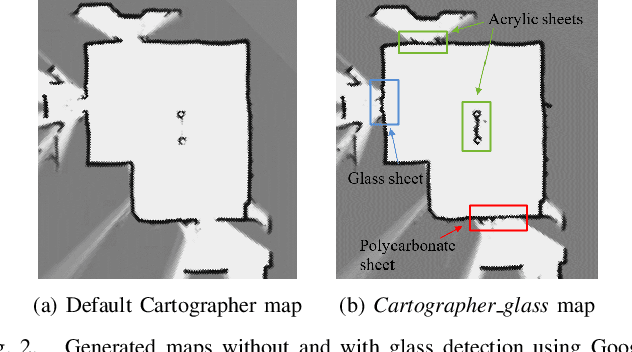
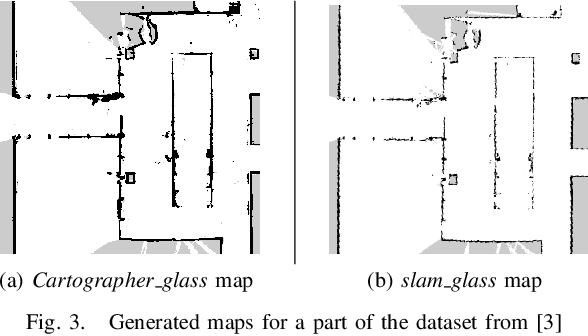
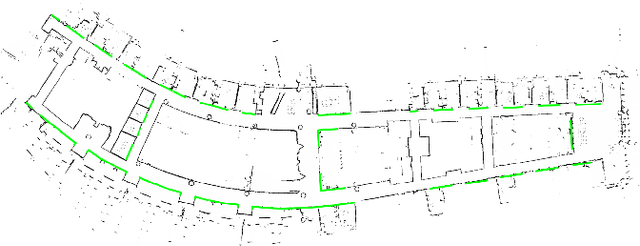
We study algorithms for detecting and including glass objects in an optimization-based Simultaneous Localization and Mapping (SLAM) algorithm in this work. When LiDAR data is the primary exteroceptive sensory input, glass objects are not correctly registered. This occurs as the incident light primarily passes through the glass objects or reflects away from the source, resulting in inaccurate range measurements for glass surfaces. Consequently, the localization and mapping performance is impacted, thereby rendering navigation in such environments unreliable. Optimization-based SLAM solutions, which are also referred to as Graph SLAM, are widely regarded as state of the art. In this paper, we utilize a simple and computationally inexpensive glass detection scheme for detecting glass objects and present the methodology to incorporate the identified objects into the occupancy grid maintained by such an algorithm (Google Cartographer). We develop both local (submap level) and global algorithms for achieving the objective mentioned above and compare the maps produced by our method with those produced by an existing algorithm that utilizes particle filter based SLAM.
Adaptive Tracking Control of Soft Robots using Integrated Sensing Skin and Recurrent Neural Networks
Nov 17, 2020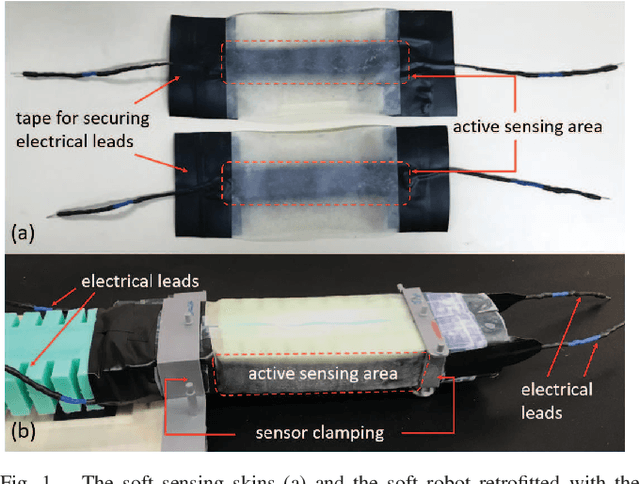
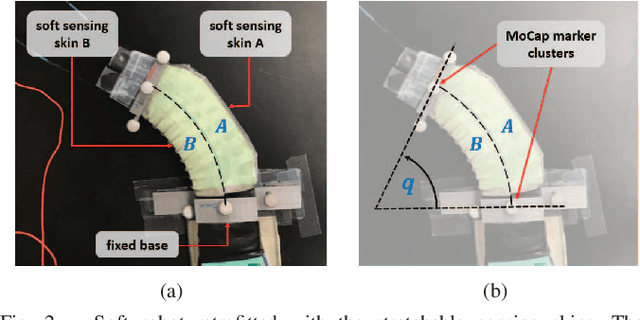
In this paper, we study integrated estimation and control of soft robots. A significant challenge in deploying closed loop controllers is reliable proprioception via integrated sensing in soft robots. Despite the considerable advances accomplished in fabrication, modelling, and model-based control of soft robots, integrated sensing and estimation is still in its infancy. To that end, this paper introduces a new method of estimating the degree of curvature of a soft robot using a stretchable sensing skin. The skin is a spray-coated piezoresistive sensing layer on a latex membrane. The mapping from the strain signal to the degree of curvature is estimated by using a recurrent neural network. We investigate uni-directional bending as well as bi-directional bending of a single-segment soft robot. Moreover, an adaptive controller is developed to track the degree of curvature of the soft robot in the presence of dynamic uncertainties. Subsequently, using the integrated soft sensing skin, we experimentally demonstrate successful curvature tracking control of the soft robot.