 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Tracking Control of Soft Robots using Integrated Sensing Skin and Recurrent Neural Networks
Paper and Code
Nov 17, 2020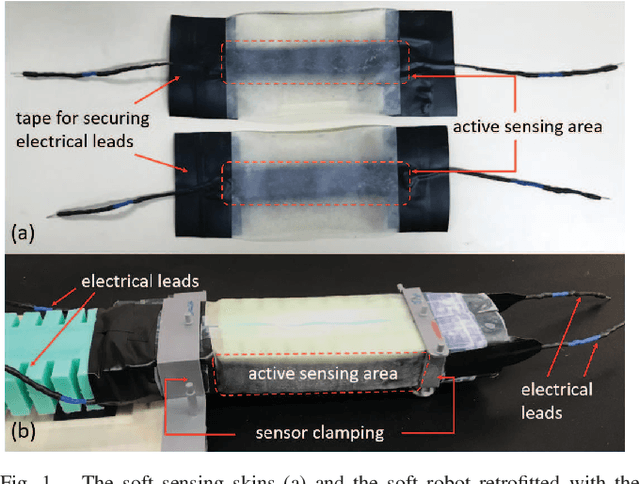
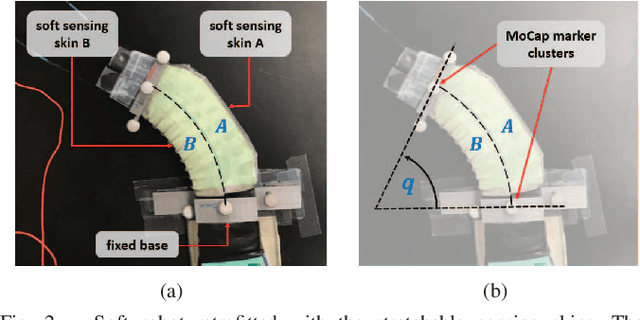
In this paper, we study integrated estimation and control of soft robots. A significant challenge in deploying closed loop controllers is reliable proprioception via integrated sensing in soft robots. Despite the considerable advances accomplished in fabrication, modelling, and model-based control of soft robots, integrated sensing and estimation is still in its infancy. To that end, this paper introduces a new method of estimating the degree of curvature of a soft robot using a stretchable sensing skin. The skin is a spray-coated piezoresistive sensing layer on a latex membrane. The mapping from the strain signal to the degree of curvature is estimated by using a recurrent neural network. We investigate uni-directional bending as well as bi-directional bending of a single-segment soft robot. Moreover, an adaptive controller is developed to track the degree of curvature of the soft robot in the presence of dynamic uncertainties. Subsequently, using the integrated soft sensing skin, we experimentally demonstrate successful curvature tracking control of the soft robot.