 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time 3D Profiling with RGB-D Mapping in Pipelines Using Stereo Camera Vision and Structured IR Laser Ring
Jul 29, 2019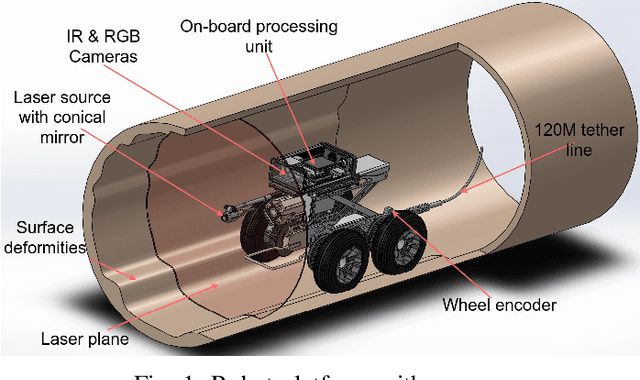
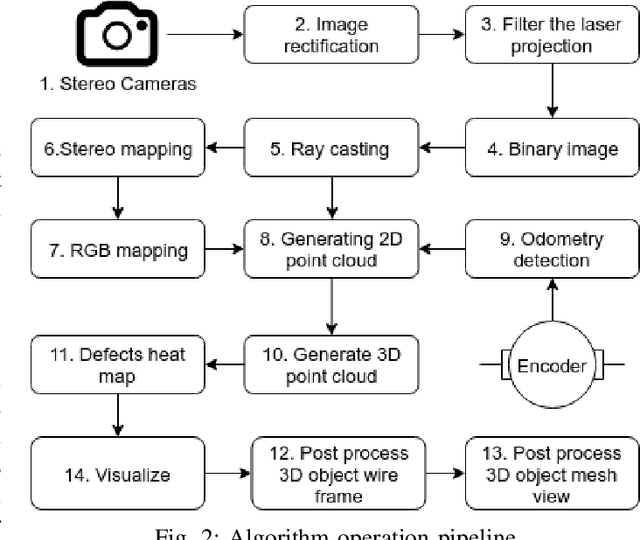
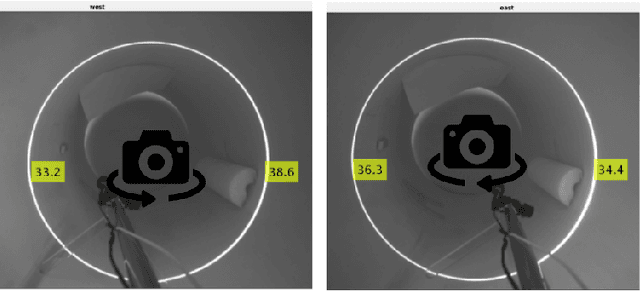
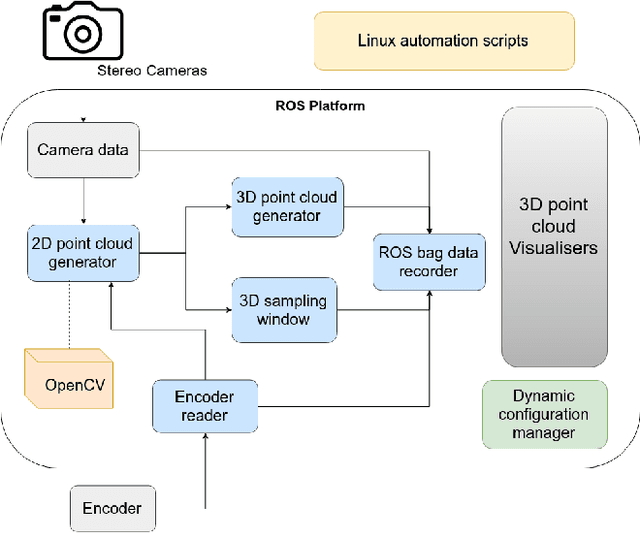
This paper is focused on delivering a solution that can scan and reconstruct the 3D profile of a pipeline in real-time using a crawler robot. A structured infrared (IR) laser ring projector and a stereo camera system are used to generate the 3D profile of the pipe as the robot moves inside the pipe. The proposed stereo system does not require field calibrations and it is not affected by the lateral movement of the robot, hence capable of producing an accurate 3D map. The wavelength of the IR light source is chosen to be non overlapping with the visible spectrum of the color camera. Hence RGB color values of the depth can be obtained by projecting the 3D map into the color image frame. The proposed system is implemented in Robotic Operating System (ROS) producing real-time RGB-D maps with defects. The defect map exploit differences in ovality enabling real-time identification of structural defects such as surface corrosion in pipe infrastructure. The lab experiments showed the proposed laser profiling system can detect ovality changes of the pipe with millimeter level of accuracy and resolution.
Understanding Human Context in 3D Scenes by Learning Spatial Affordances with Virtual Skeleton Models
Jun 13, 2019
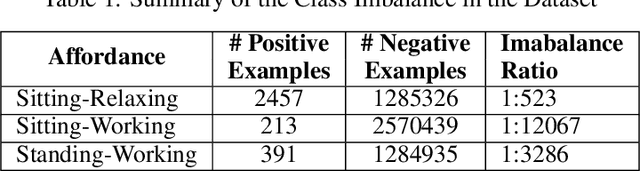
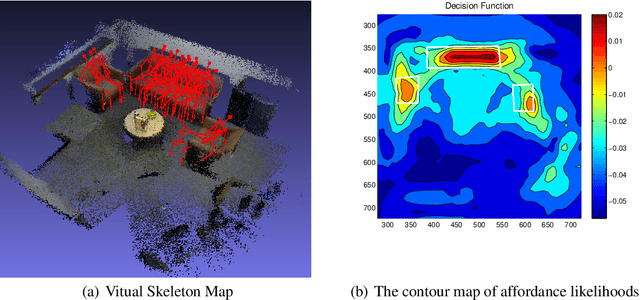
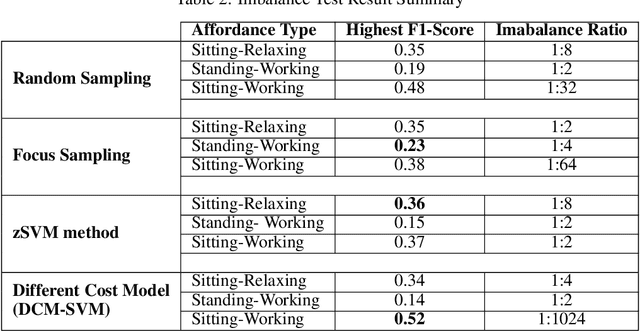
Robots are often required to operate in environments where humans are not present, but yet require the human context information for better human-robot interaction. Even when humans are present in the environment, detecting their presence in cluttered environments could be challenging. As a solution to this problem, this paper presents the concept of spatial affordance map which learns human context by looking at geometric features of the environment. Instead of observing real humans to learn human context, it uses virtual human models and their relationships with the environment to map hidden human affordances in 3D scenes by placing virtual skeleton models in 3D scenes with their confidence values. The spatial affordance map learning problem is formulated as a multi-label classification problem that can be learned using Support Vector Machine (SVM) based learners. Experiments carried out in a real 3D scene dataset recorded promising results and proved the applicability of affordance-map for mapping human context.