 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuide-LLM: An Embodied LLM Agent and Text-Based Topological Map for Robotic Guidance of People with Visual Impairments
Oct 28, 2024



Navigation presents a significant challenge for persons with visual impairments (PVI). While traditional aids such as white canes and guide dogs are invaluable, they fall short in delivering detailed spatial information and precise guidance to desired locations. Recent developments in large language models (LLMs) and vision-language models (VLMs) offer new avenues for enhancing assistive navigation. In this paper, we introduce Guide-LLM, an embodied LLM-based agent designed to assist PVI in navigating large indoor environments. Our approach features a novel text-based topological map that enables the LLM to plan global paths using a simplified environmental representation, focusing on straight paths and right-angle turns to facilitate navigation. Additionally, we utilize the LLM's commonsense reasoning for hazard detection and personalized path planning based on user preferences. Simulated experiments demonstrate the system's efficacy in guiding PVI, underscoring its potential as a significant advancement in assistive technology. The results highlight Guide-LLM's ability to offer efficient, adaptive, and personalized navigation assistance, pointing to promising advancements in this field.
Real-Time 3D Profiling with RGB-D Mapping in Pipelines Using Stereo Camera Vision and Structured IR Laser Ring
Jul 29, 2019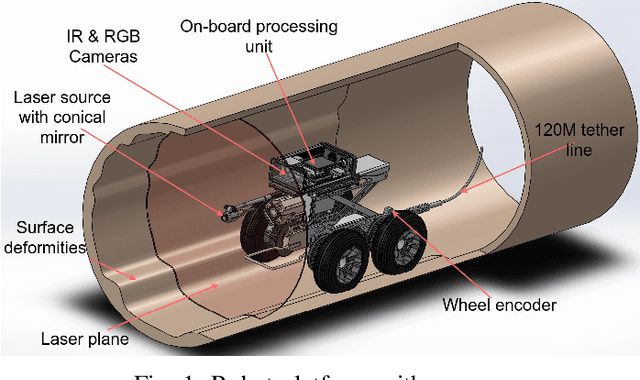
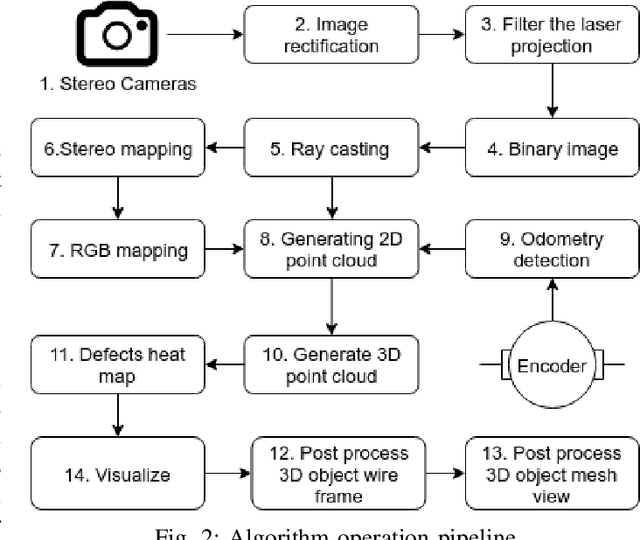
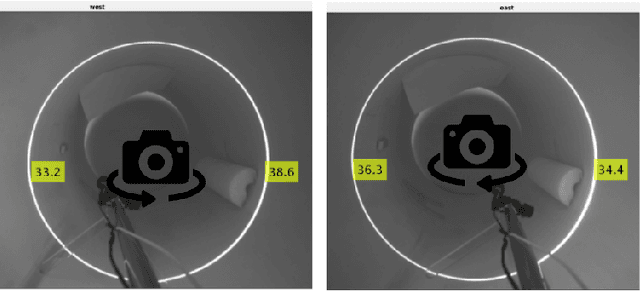
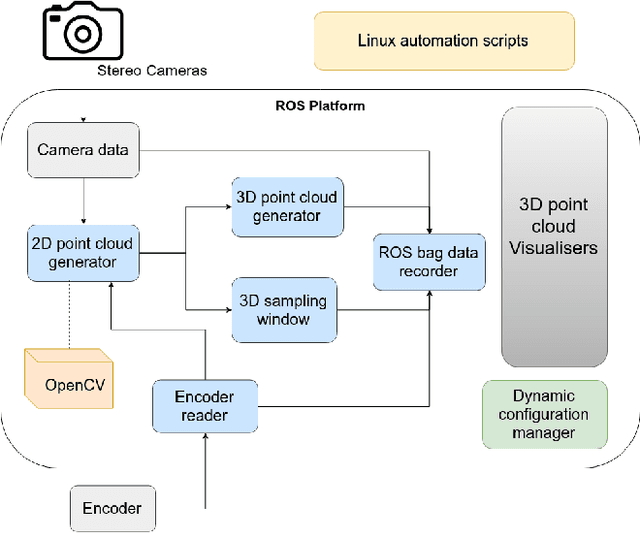
This paper is focused on delivering a solution that can scan and reconstruct the 3D profile of a pipeline in real-time using a crawler robot. A structured infrared (IR) laser ring projector and a stereo camera system are used to generate the 3D profile of the pipe as the robot moves inside the pipe. The proposed stereo system does not require field calibrations and it is not affected by the lateral movement of the robot, hence capable of producing an accurate 3D map. The wavelength of the IR light source is chosen to be non overlapping with the visible spectrum of the color camera. Hence RGB color values of the depth can be obtained by projecting the 3D map into the color image frame. The proposed system is implemented in Robotic Operating System (ROS) producing real-time RGB-D maps with defects. The defect map exploit differences in ovality enabling real-time identification of structural defects such as surface corrosion in pipe infrastructure. The lab experiments showed the proposed laser profiling system can detect ovality changes of the pipe with millimeter level of accuracy and resolution.