 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowDA: Accurate, Low-Latency Weather Data Assimilation via Flow Matching
Feb 06, 2026Data assimilation (DA) is a fundamental component of modern weather prediction, yet it remains a major computational bottleneck in machine learning (ML)-based forecasting pipelines due to reliance on traditional variational methods. Recent generative ML-based DA methods offer a promising alternative but typically require many sampling steps and suffer from error accumulation under long-horizon auto-regressive rollouts with cycling assimilation. We propose FlowDA, a low-latency weather-scale generative DA framework based on flow matching. FlowDA conditions on observations through a SetConv-based embedding and fine-tunes the Aurora foundation model to deliver accurate, efficient, and robust analyses. Experiments across observation rates decreasing from $3.9\%$ to $0.1\%$ demonstrate superior performance of FlowDA over strong baselines with similar tunable-parameter size. FlowDA further shows robustness to observational noise and stable performance in long-horizon auto-regressive cycling DA. Overall, FlowDA points to an efficient and scalable direction for data-driven DA.
Using Large Language Models for Parametric Shape Optimization
Dec 11, 2024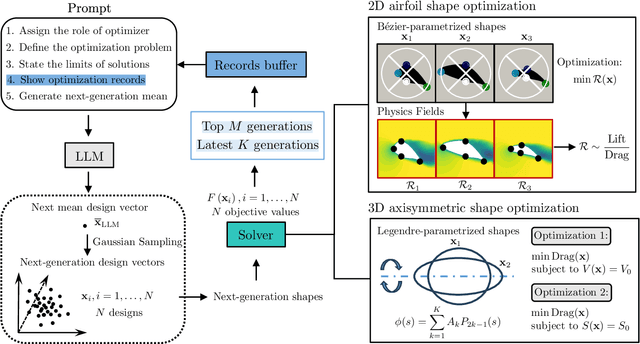
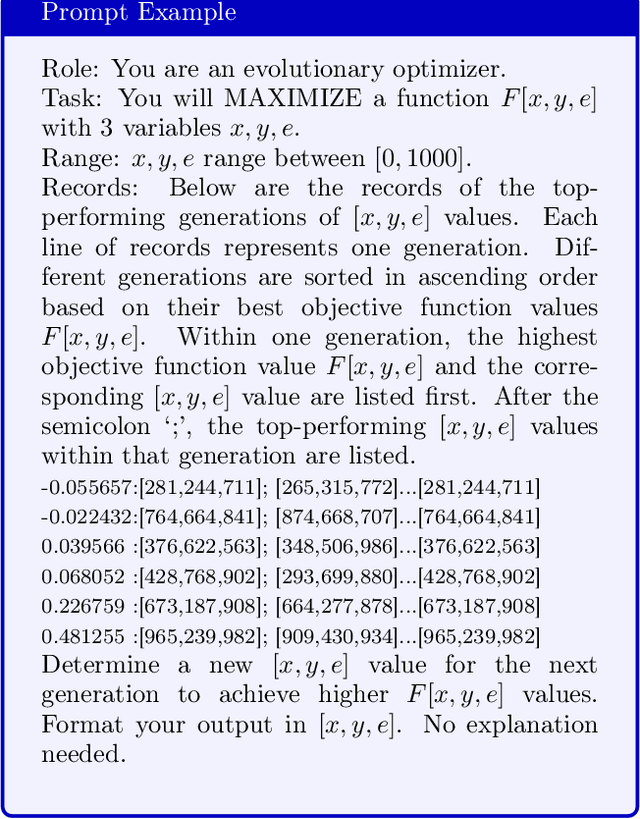
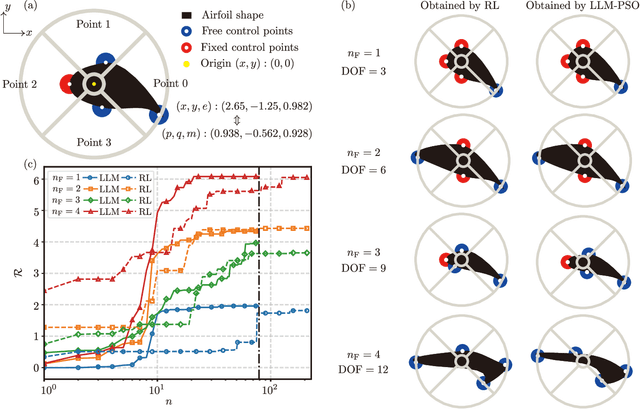
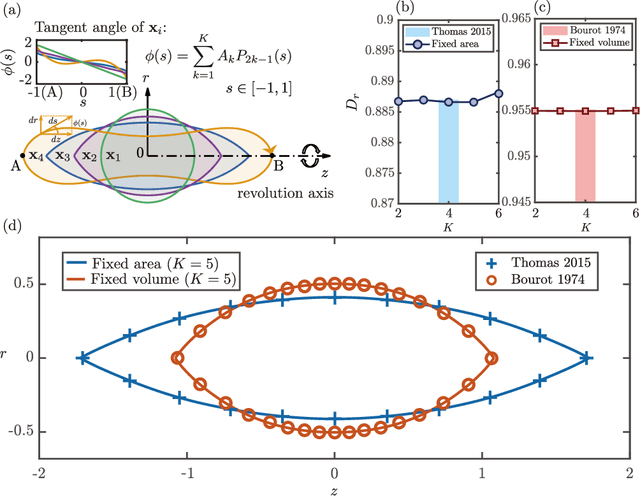
Recent advanced large language models (LLMs) have showcased their emergent capability of in-context learning, facilitating intelligent decision-making through natural language prompts without retraining. This new machine learning paradigm has shown promise in various fields, including general control and optimization problems. Inspired by these advancements, we explore the potential of LLMs for a specific and essential engineering task: parametric shape optimization (PSO). We develop an optimization framework, LLM-PSO, that leverages an LLM to determine the optimal shape of parameterized engineering designs in the spirit of evolutionary strategies. Utilizing the ``Claude 3.5 Sonnet'' LLM, we evaluate LLM-PSO on two benchmark flow optimization problems, specifically aiming to identify drag-minimizing profiles for 1) a two-dimensional airfoil in laminar flow, and 2) a three-dimensional axisymmetric body in Stokes flow. In both cases, LLM-PSO successfully identifies optimal shapes in agreement with benchmark solutions. Besides, it generally converges faster than other classical optimization algorithms. Our preliminary exploration may inspire further investigations into harnessing LLMs for shape optimization and engineering design more broadly.
Training microrobots to swim by a large language model
Jan 21, 2024Machine learning and artificial intelligence have recently represented a popular paradigm for designing and optimizing robotic systems across various scales. Recent studies have showcased the innovative application of large language models (LLMs) in industrial control [1] and in directing legged walking robots [2]. In this study, we utilize an LLM, GPT-4, to train two prototypical microrobots for swimming in viscous fluids. Adopting a few-shot learning approach, we develop a minimal, unified prompt composed of only five sentences. The same concise prompt successfully guides two distinct articulated microrobots -- the three-link swimmer and the three-sphere swimmer -- in mastering their signature strokes. These strokes, initially conceptualized by physicists, are now effectively interpreted and applied by the LLM, enabling the microrobots to circumvent the physical constraints inherent to micro-locomotion. Remarkably, our LLM-based decision-making strategy substantially surpasses a traditional reinforcement learning method in terms of training speed. We discuss the nuanced aspects of prompt design, particularly emphasizing the reduction of monetary expenses of using GPT-4.