 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Optimizing RAG for Domain Chatbots
Jan 10, 2024


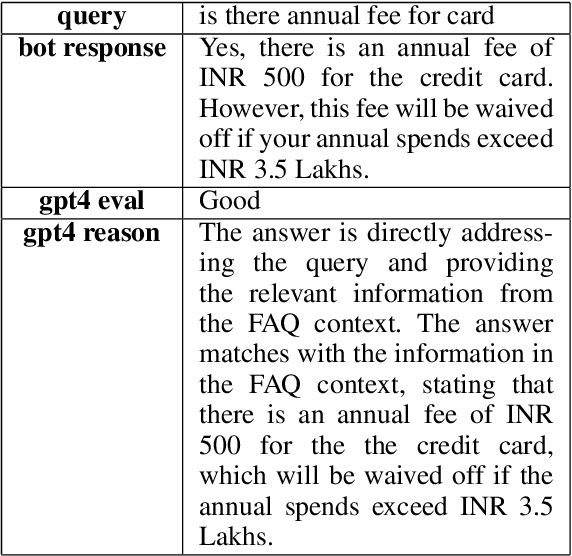
With the advent of Large Language Models (LLM), conversational assistants have become prevalent for domain use cases. LLMs acquire the ability to contextual question answering through training, and Retrieval Augmented Generation (RAG) further enables the bot to answer domain-specific questions. This paper describes a RAG-based approach for building a chatbot that answers user's queries using Frequently Asked Questions (FAQ) data. We train an in-house retrieval embedding model using infoNCE loss, and experimental results demonstrate that the in-house model works significantly better than the well-known general-purpose public embedding model, both in terms of retrieval accuracy and Out-of-Domain (OOD) query detection. As an LLM, we use an open API-based paid ChatGPT model. We noticed that a previously retrieved-context could be used to generate an answer for specific patterns/sequences of queries (e.g., follow-up queries). Hence, there is a scope to optimize the number of LLM tokens and cost. Assuming a fixed retrieval model and an LLM, we optimize the number of LLM tokens using Reinforcement Learning (RL). Specifically, we propose a policy-based model external to the RAG, which interacts with the RAG pipeline through policy actions and updates the policy to optimize the cost. The policy model can perform two actions: to fetch FAQ context or skip retrieval. We use the open API-based GPT-4 as the reward model. We then train a policy model using policy gradient on multiple training chat sessions. As a policy model, we experimented with a public gpt-2 model and an in-house BERT model. With the proposed RL-based optimization combined with similarity threshold, we are able to achieve significant cost savings while getting a slightly improved accuracy. Though we demonstrate results for the FAQ chatbot, the proposed RL approach is generic and can be experimented with any existing RAG pipeline.
Virtual Testbed for Monocular Visual Navigation of Small Unmanned Aircraft Systems
Jul 01, 2020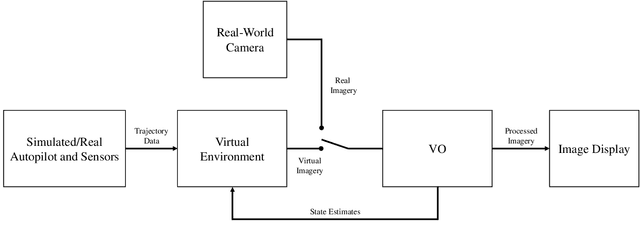
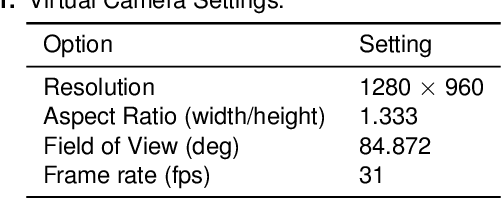
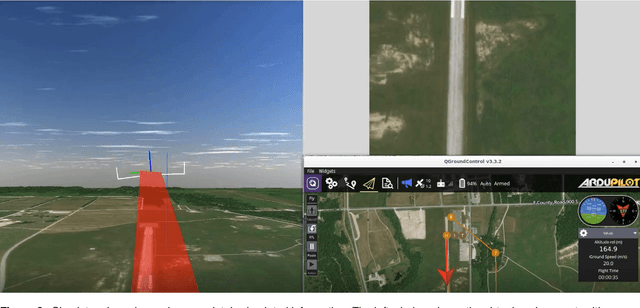
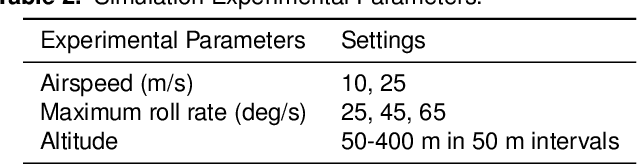
Monocular visual navigation methods have seen significant advances in the last decade, recently producing several real-time solutions for autonomously navigating small unmanned aircraft systems without relying on GPS. This is critical for military operations which may involve environments where GPS signals are degraded or denied. However, testing and comparing visual navigation algorithms remains a challenge since visual data is expensive to gather. Conducting flight tests in a virtual environment is an attractive solution prior to committing to outdoor testing. This work presents a virtual testbed for conducting simulated flight tests over real-world terrain and analyzing the real-time performance of visual navigation algorithms at 31 Hz. This tool was created to ultimately find a visual odometry algorithm appropriate for further GPS-denied navigation research on fixed-wing aircraft, even though all of the algorithms were designed for other modalities. This testbed was used to evaluate three current state-of-the-art, open-source monocular visual odometry algorithms on a fixed-wing platform: Direct Sparse Odometry, Semi-Direct Visual Odometry, and ORB-SLAM2 (with loop closures disabled).