 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering the Effectiveness of Pre-Training in a Large-scale Car-sharing Platform
May 02, 2023Recent progress of deep learning has empowered various intelligent transportation applications, especially in car-sharing platforms. While the traditional operations of the car-sharing service highly relied on human engagements in fleet management, modern car-sharing platforms let users upload car images before and after their use to inspect the cars without a physical visit. To automate the aforementioned inspection task, prior approaches utilized deep neural networks. They commonly employed pre-training, a de-facto technique to establish an effective model under the limited number of labeled datasets. As candidate practitioners who deal with car images would presumably get suffered from the lack of a labeled dataset, we analyzed a sophisticated analogy into the effectiveness of pre-training is important. However, prior studies primarily shed a little spotlight on the effectiveness of pre-training. Motivated by the aforementioned lack of analysis, our study proposes a series of analyses to unveil the effectiveness of various pre-training methods in image recognition tasks at the car-sharing platform. We set two real-world image recognition tasks in the car-sharing platform in a live service, established them under the many-shot and few-shot problem settings, and scrutinized which pre-training method accomplishes the most effective performance in which setting. Furthermore, we analyzed how does the pre-training and fine-tuning convey different knowledge to the neural networks for a precise understanding.
Deep Dense Local Feature Matching and Vehicle Removal for Indoor Visual Localization
May 25, 2022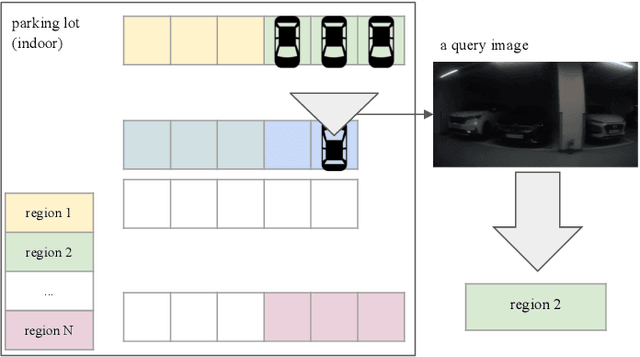
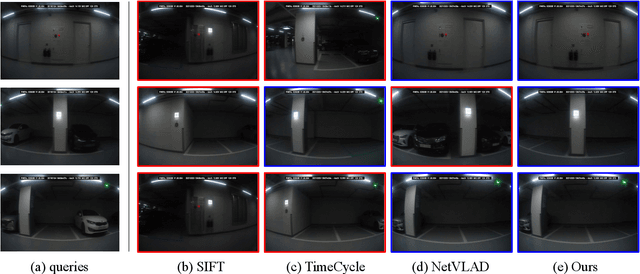


Visual localization is an essential component of intelligent transportation systems, enabling broad applications that require understanding one's self location when other sensors are not available. It is mostly tackled by image retrieval such that the location of a query image is determined by its closest match in the previously collected images. Existing approaches focus on large scale localization where landmarks are helpful in finding the location. However, visual localization becomes challenging in small scale environments where objects are hardly recognizable. In this paper, we propose a visual localization framework that robustly finds the match for a query among the images collected from indoor parking lots. It is a challenging problem when the vehicles in the images share similar appearances and are frequently replaced such as parking lots. We propose to employ a deep dense local feature matching that resembles human perception to find correspondences and eliminating matches from vehicles automatically with a vehicle detector. The proposed solution is robust to the scenes with low textures and invariant to false matches caused by vehicles. We compare our framework with alternatives to validate our superiority on a benchmark dataset containing 267 pre-collected images and 99 query images taken from 34 sections of a parking lot. Our method achieves 86.9 percent accuracy, outperforming the alternatives.
Unsupervised Driver Behavior Profiling leveraging Recurrent Neural Networks
Aug 11, 2021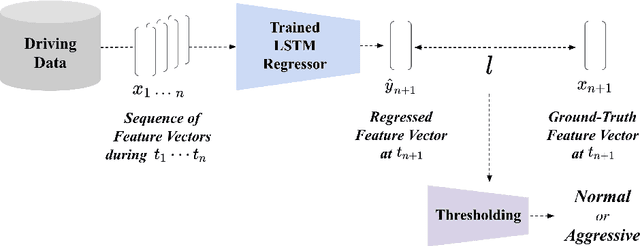
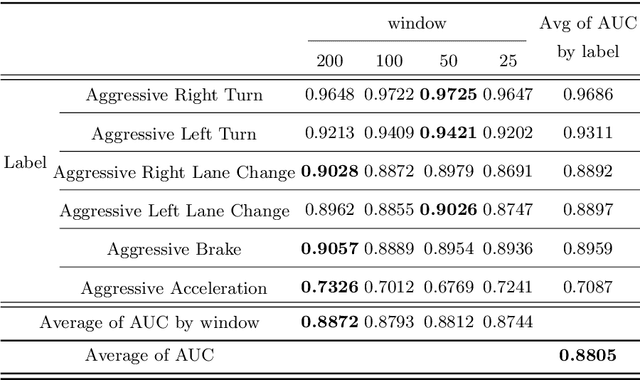
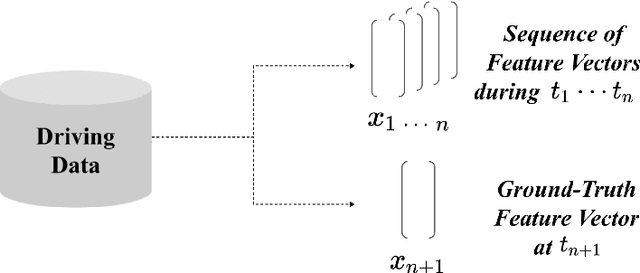
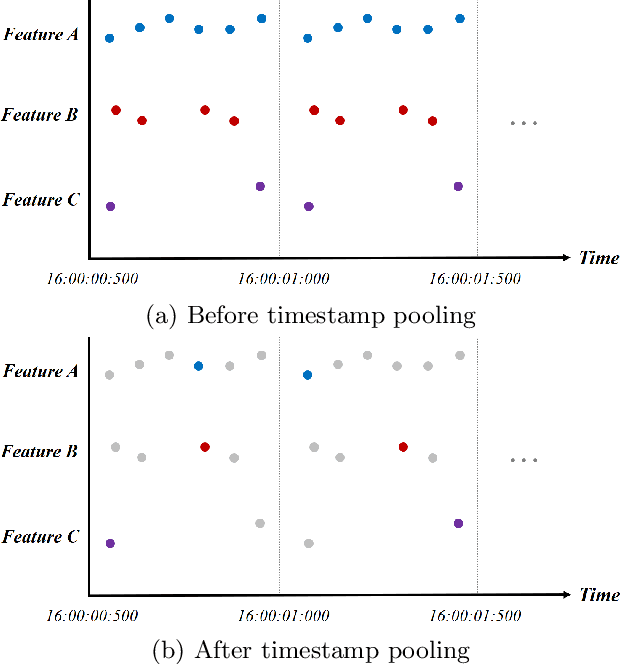
In the era of intelligent transportation, driver behavior profiling has become a beneficial technology as it provides knowledge regarding the driver's aggressiveness. Previous approaches achieved promising driver behavior profiling performance through establishing statistical heuristics rules or supervised learning-based models. Still, there exist limits that the practitioner should prepare a labeled dataset, and prior approaches could not classify aggressive behaviors which are not known a priori. In pursuit of improving the aforementioned drawbacks, we propose a novel approach to driver behavior profiling leveraging an unsupervised learning paradigm. First, we cast the driver behavior profiling problem as anomaly detection. Second, we established recurrent neural networks that predict the next feature vector given a sequence of feature vectors. We trained the model with normal driver data only. As a result, our model yields high regression error given a sequence of aggressive driver behavior and low error given at a sequence of normal driver behavior. We figured this difference of error between normal and aggressive driver behavior can be an adequate flag for driver behavior profiling and accomplished a precise performance in experiments. Lastly, we further analyzed the optimal level of sequence length for identifying each aggressive driver behavior. We expect the proposed approach to be a useful baseline for unsupervised driver behavior profiling and contribute to the efficient, intelligent transportation ecosystem.
Unsupervised Intrusion Detection System for Unmanned Aerial Vehicle with Less Labeling Effort
Nov 01, 2020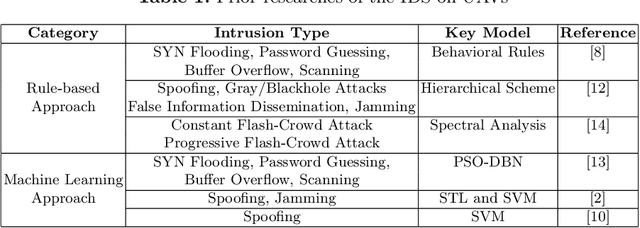


Along with the importance of safety, an IDS has become a significant task in the real world. Prior studies proposed various intrusion detection models for the UAV. Past rule-based approaches provided a concrete baseline IDS model, and the machine learning-based method achieved a precise intrusion detection performance on the UAV with supervised learning models. However, previous methods have room for improvement to be implemented in the real world. Prior methods required a large labeling effort on the dataset, and the model could not identify attacks that were not trained before. To jump over these hurdles, we propose an IDS with unsupervised learning. As unsupervised learning does not require labeling, our model let the practitioner not to label every type of attack from the flight data. Moreover, the model can identify an abnormal status of the UAV regardless of the type of attack. We trained an autoencoder with the benign flight data only and checked the model provides a different reconstruction loss at the benign flight and the flight under attack. We discovered that the model produces much higher reconstruction loss with the flight under attack than the benign flight; thus, this reconstruction loss can be utilized to recognize an intrusion to the UAV. With consideration of the computation overhead and the detection performance in the wild, we expect our model can be a concrete and practical baseline IDS on the UAV.
This Car is Mine!: Automobile Theft Countermeasure Leveraging Driver Identification with Generative Adversarial Networks
Nov 22, 2019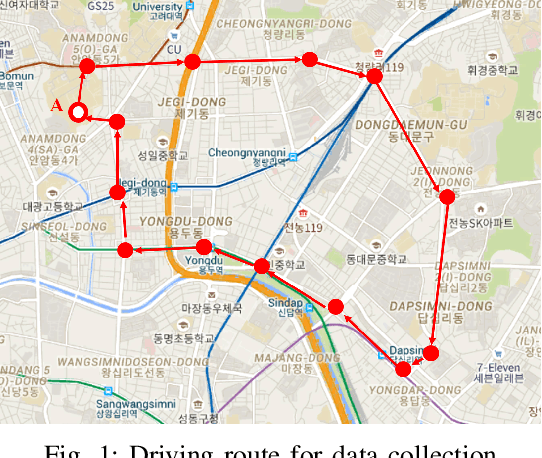
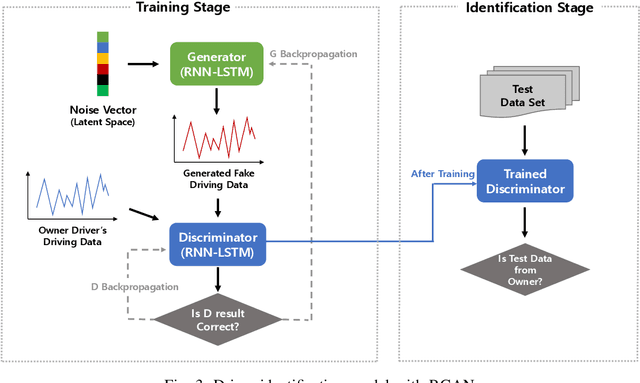

As a car becomes more connected, a countermeasure against automobile theft has become a significant task in the real world. To respond to automobile theft, data mining, biometrics, and additional authentication methods are proposed. Among current countermeasures, data mining method is one of the efficient ways to capture the owner driver's unique characteristics. To identify the owner driver from thieves, previous works applied various algorithms toward driving data. Such data mining methods utilized supervised learning, thus required labeled data set. However, it is unrealistic to gather and apply the thief's driving pattern. To overcome this problem, we propose driver identification method with GAN. GAN has merit to build identification model by learning the owner driver's data only. We trained GAN only with owner driver's data and used trained discriminator to identify the owner driver. From actual driving data, we evaluated our identification model recognizes the owner driver well. By ensembling various driver authentication methods with the proposed model, we expect industry can develop automobile theft countermeasures available in the real world.
Automobile Theft Detection by Clustering Owner Driver Data
Sep 19, 2019
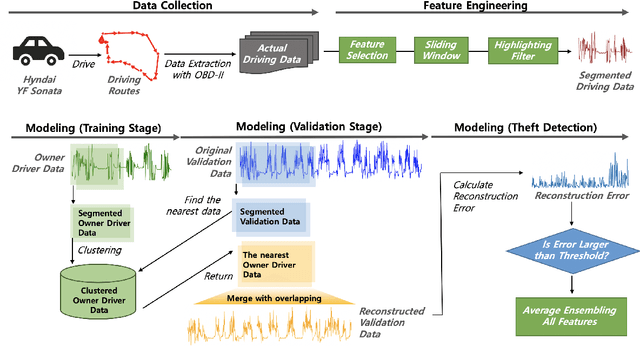


As automobiles become intelligent, automobile theft methods are evolving intelligently. Therefore automobile theft detection has become a major research challenge. Data-mining, biometrics, and additional authentication methods have been proposed to address automobile theft, in previous studies. Among these methods, data-mining can be used to analyze driving characteristics and identify a driver comprehensively. However, it requires a labeled driving dataset to achieve high accuracy. It is impractical to use the actual automobile theft detection system because real theft driving data cannot be collected in advance. Hence, we propose a method to detect an automobile theft attempt using only owner driving data. We cluster the key features of the owner driving data using the k-means algorithm. After reconstructing the driving data into one of these clusters, theft is detected using an error from the original driving data. To validate the proposed models, we tested our actual driving data and obtained 99% accuracy from the best model. This result demonstrates that our proposed method can detect vehicle theft by using only the car owner's driving data.
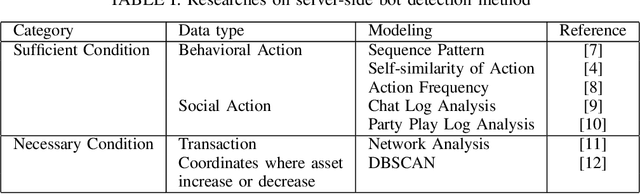
Show Me Your Account: Detecting MMORPG Game Bot Leveraging Financial Analysis with LSTM
Aug 10, 2019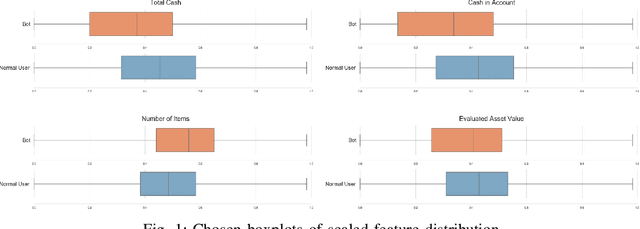
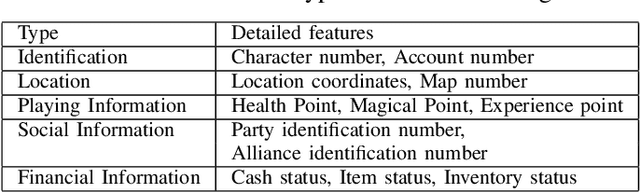
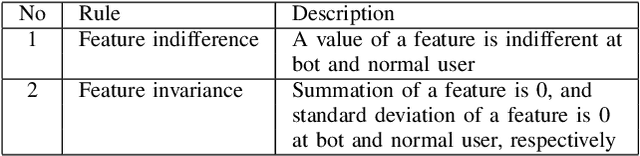
With the rapid growth of MMORPG market, game bot detection has become an essential task for maintaining stable in-game ecosystem. To classify bots from normal users, detection methods are proposed in both game client and server-side. Among various classification methods, data mining method in server-side captured unique characteristics of bots efficiently. For features used in data mining, behavioral and social actions of character are analyzed with numerous algorithms. However, bot developers can evade the previous detection methods by changing bot's activities continuously. Eventually, overall maintenance cost increases because the selected features need to be updated along with the change of bot's behavior. To overcome this limitation, we propose improved bot detection method with financial analysis. As bot's activity absolutely necessitates the change of financial status, analyzing financial fluctuation effectively captures bots as a key feature. We trained and tested model with actual data of Aion, a leading MMORPG in Asia. Leveraging that LSTM efficiently recognizes time-series movement of data, we achieved meaningful detection performance. Further on this model, we expect sustainable bot detection system in the near future.