 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Driver Behavior Profiling leveraging Recurrent Neural Networks
Aug 11, 2021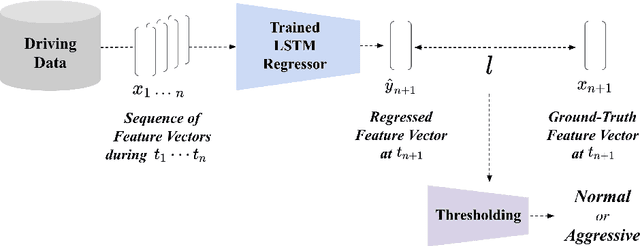
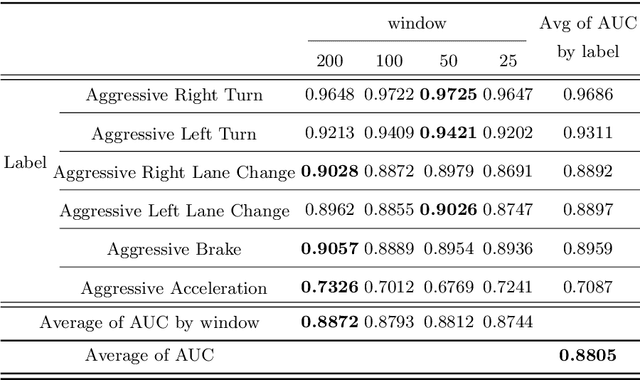
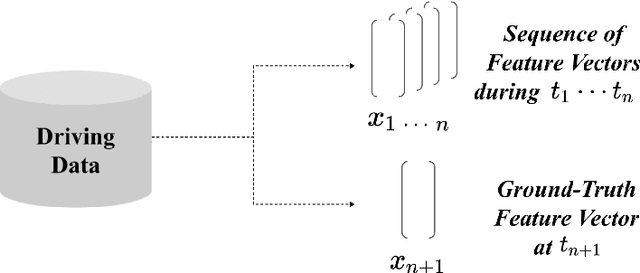
In the era of intelligent transportation, driver behavior profiling has become a beneficial technology as it provides knowledge regarding the driver's aggressiveness. Previous approaches achieved promising driver behavior profiling performance through establishing statistical heuristics rules or supervised learning-based models. Still, there exist limits that the practitioner should prepare a labeled dataset, and prior approaches could not classify aggressive behaviors which are not known a priori. In pursuit of improving the aforementioned drawbacks, we propose a novel approach to driver behavior profiling leveraging an unsupervised learning paradigm. First, we cast the driver behavior profiling problem as anomaly detection. Second, we established recurrent neural networks that predict the next feature vector given a sequence of feature vectors. We trained the model with normal driver data only. As a result, our model yields high regression error given a sequence of aggressive driver behavior and low error given at a sequence of normal driver behavior. We figured this difference of error between normal and aggressive driver behavior can be an adequate flag for driver behavior profiling and accomplished a precise performance in experiments. Lastly, we further analyzed the optimal level of sequence length for identifying each aggressive driver behavior. We expect the proposed approach to be a useful baseline for unsupervised driver behavior profiling and contribute to the efficient, intelligent transportation ecosystem.