 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Reward Estimator Bottleneck: Learning Robust Reward Estimator for Multi-Domain Task-Oriented Dialog
May 31, 2020
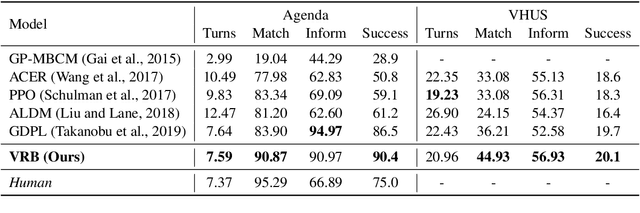
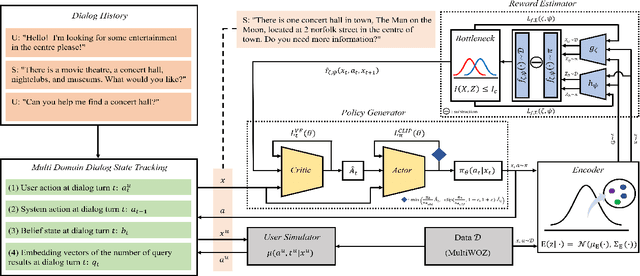
Despite its notable success in adversarial learning approaches to multi-domain task-oriented dialog system, training the dialog policy via adversarial inverse reinforcement learning often fails to balance the performance of the policy generator and reward estimator. During optimization, the reward estimator often overwhelms the policy generator and produces excessively uninformative gradients. We proposes the Variational Reward estimator Bottleneck (VRB), which is an effective regularization method that aims to constrain unproductive information flows between inputs and the reward estimator. The VRB focuses on capturing discriminative features, by exploiting information bottleneck on mutual information. Empirical results on a multi-domain task-oriented dialog dataset demonstrate that the VRB significantly outperforms previous methods.