 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizable Image Repair for Robust Visual Autonomous Racing
Mar 07, 2025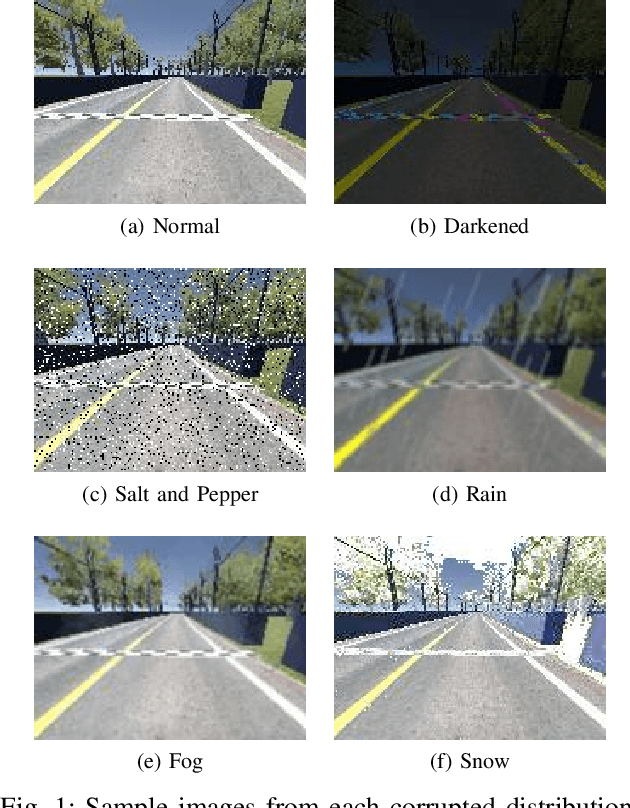
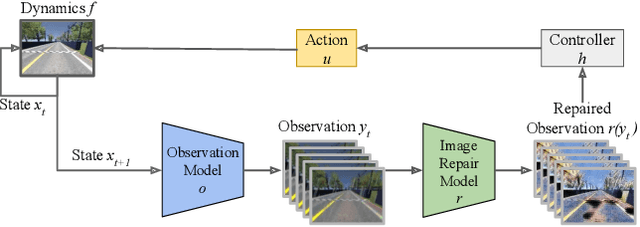
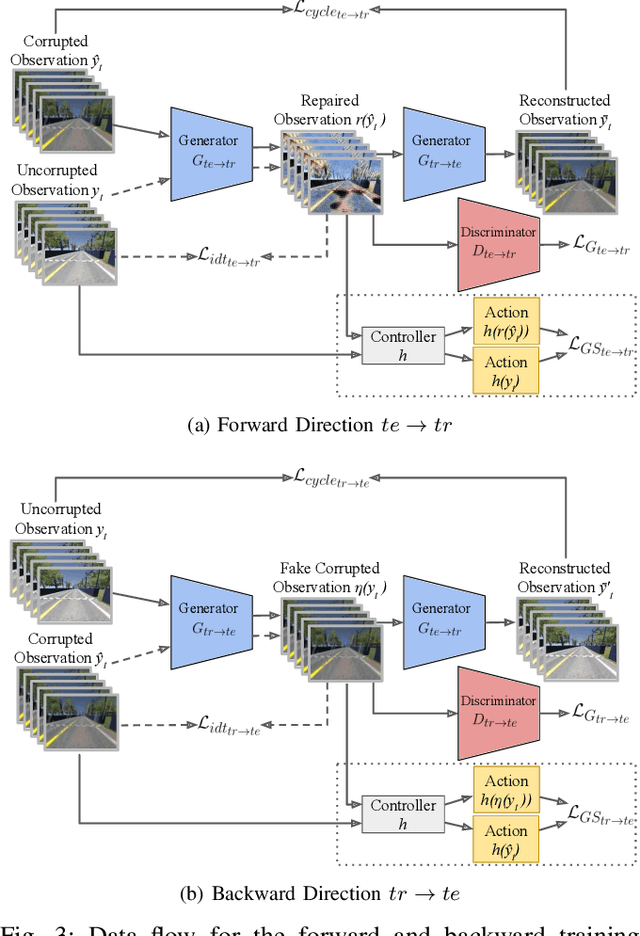
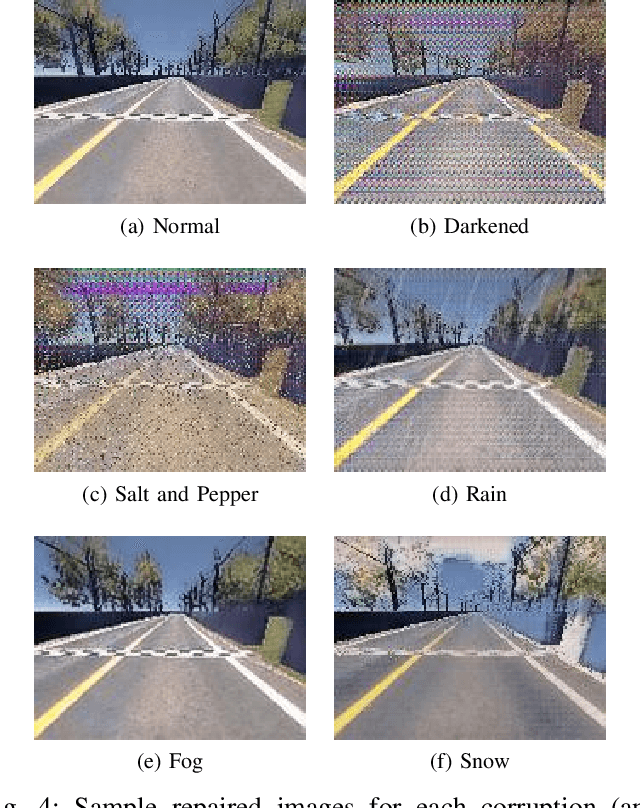
Vision-based autonomous racing relies on accurate perception for robust control. However, image distribution changes caused by sensor noise, adverse weather, and dynamic lighting can degrade perception, leading to suboptimal control decisions. Existing approaches, including domain adaptation and adversarial training, improve robustness but struggle to generalize to unseen corruptions while introducing computational overhead. To address this challenge, we propose a real-time image repair module that restores corrupted images before they are used by the controller. Our method leverages generative adversarial models, specifically CycleGAN and pix2pix, for image repair. CycleGAN enables unpaired image-to-image translation to adapt to novel corruptions, while pix2pix exploits paired image data when available to improve the quality. To ensure alignment with control performance, we introduce a control-focused loss function that prioritizes perceptual consistency in repaired images. We evaluated our method in a simulated autonomous racing environment with various visual corruptions. The results show that our approach significantly improves performance compared to baselines, mitigating distribution shift and enhancing controller reliability.